22
22| 22 |
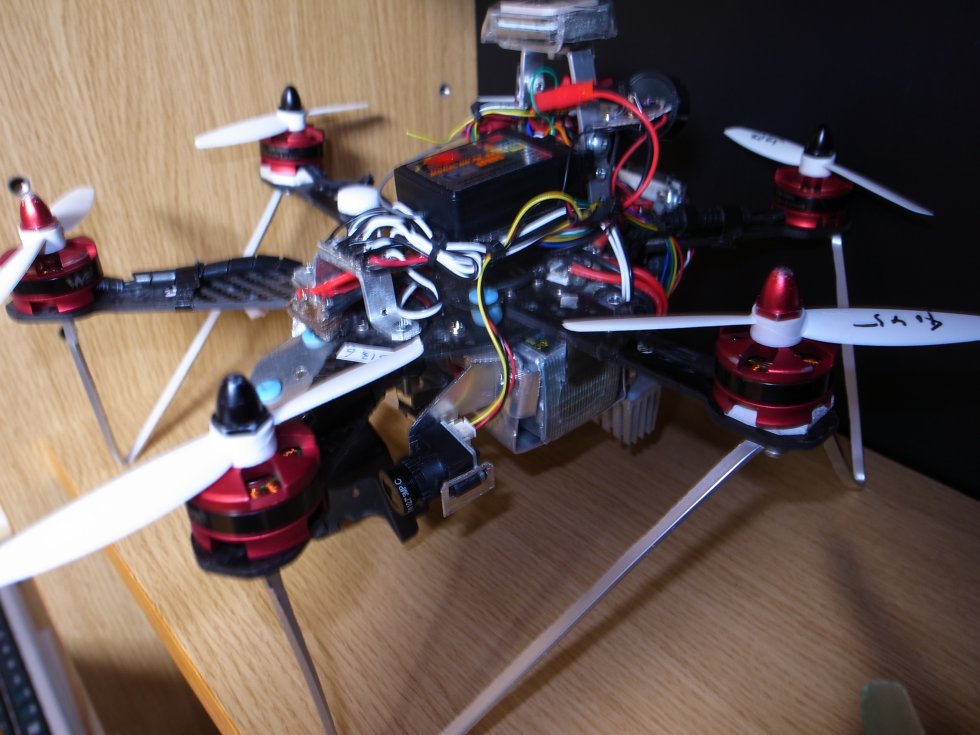
APM2.8フライトコントローラシリーズを使ったドローン自作ja8oxy/muroran
最近、APMにはコンパス内蔵と、コンパスのないものがありますので、注意です。
同じようにGPS BN-880にもコンパス有り無しがあるようです。
GPSポートの直ぐ横にジャンパーピンを入れると内蔵コンパスが動くようです。
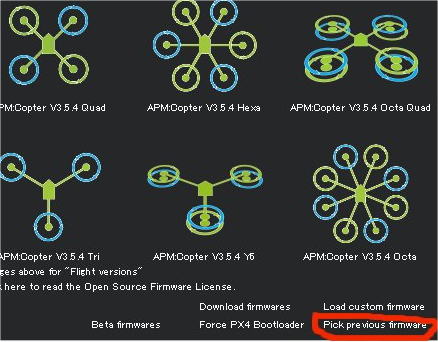
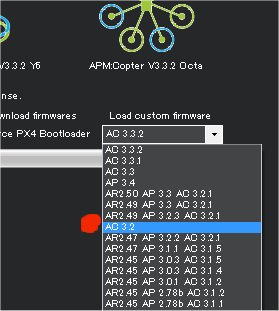
最新のMission Planner を使うと 古いAPMに対応して自動的に 3.2.1 を入れてくれるようだただし、
入れ方はちょいと難しかったり。入らなかったりする
現在はおもに1.3.50を使っている FWを入れるのは1.3.75
が良いかもしれない。
2025/06/14
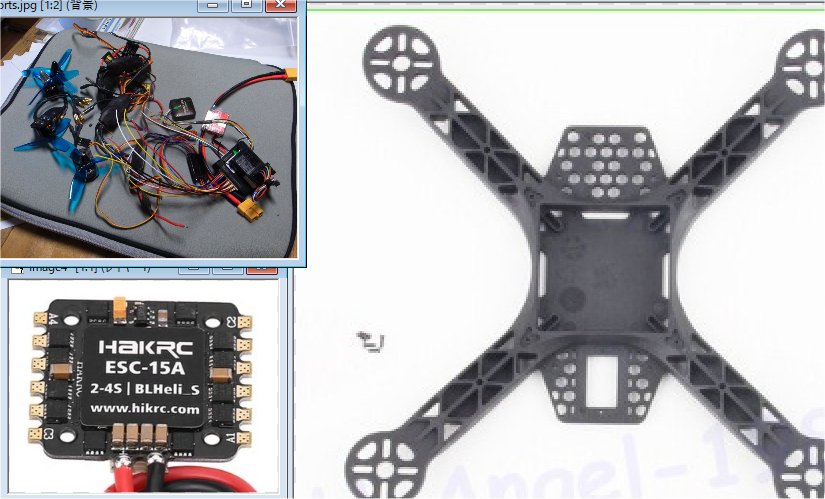
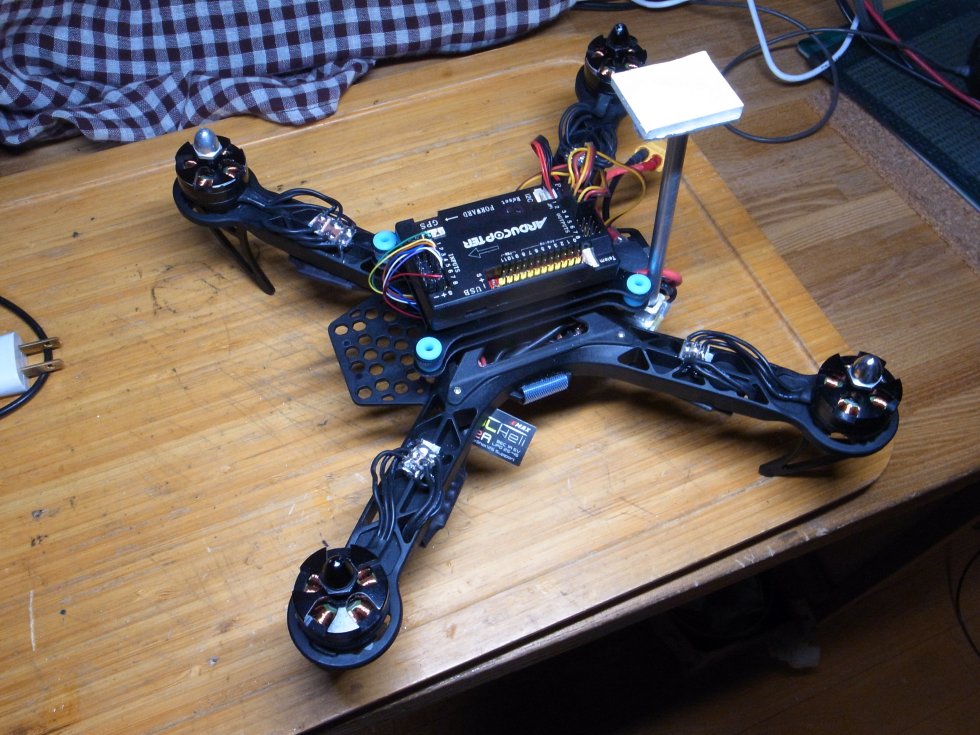
いままで、製作中、改造中に、余ったり、変更したりで、在庫になった部品を寄せ集めて、40cmクラスの機体を作ってます。

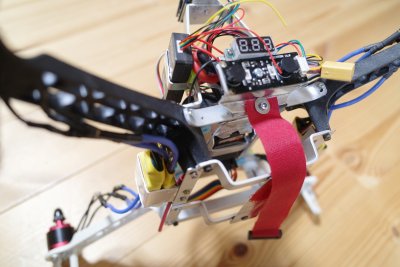
ところが、持っていたAPM2.8は2個とも壊れて居て、正常に動きませんでした。
仕方ないので、ALIEXPRESSで購入した APMにはコンバスが無く、GPS(BN-880)にもコンパスが無い。
安物買いの。。。。です。
コンパス内蔵のAPMを買うことにします。 2.5mmのアルミ板で本体を作ってます。アームは重いけど余っているので
市販のプラスチックです。テレメータを付けてます 壊れていたledインジケータを修理して(ごまかして)使ってます
---------------------------------------------------------------------------------------------------
私の製作したドローンおよび、使用しているFLYSKY送信機には
株式会社ジェイディーシー の製品を一部使用しています。
写真をクリックでテスト飛行動画が表示されます。


F500QD 2019/03完成 F250HEX BAT=4s CAM mount
prop=1245 MT=3508/580KV PROP=4045
APM2.8 MinAPM3.1 2204/2300KV 4C
BAT=4500-6000mAH/3C 4C=OK BAT=2200maH/4C
1040g 1450g 872g バッテリー含み
10'50''飛行可 6分45秒飛行
GIMBAL FPV など必要ユニット どう見ても、ペラの能率が悪そうだ。
取り付け取り外し可能 これでも
15A/11.1Vで飛行 ハンチングしそうな感じ
F500バッテリー寿命で自動着陸動画


F5545MK2 2019/04完成 F200MK2 受信器RX601 送信機DEVO7に交換してみた
PROP 1045 MT 2312/920KV/3c 4c対応 PROP=5045/3 ↑2019/11/19
APM2.8 MinAPM3.1 2204/2300KV
BAT 5000-6000mAH/11.1V-14.8V BAT=2800mAH/3C
カメラマウント+FPV付き1.27kg 1.72kg(bat) 630g/2700mAH (450g)
9'30''飛行可能 6000mAH/11.1V 9~10分+飛行
モーターを980KVに交換してみた、5'ペラでは浮上不可
radio ERR発生。。FW上書きで直ったかも
目次
1.トピック
2.製作前の準備事項
2-1 送信機と受信機 FS-TH9X FS-R9B/ FS-RM003ユニット
送信機と受信器のバインド方法
2-2 送信機と受信器のプロトコルについて
3.最低限の必要パーツリスト
4.組み立て概要
製作手順
4-1 受信機とAPMの配線
4-2 APMのピンアサイン APM2.8/APM3.1
4-3 GPS の取り付け
4-4 BEC の取り付け(電源装置)
4-5 FPVの取り付け
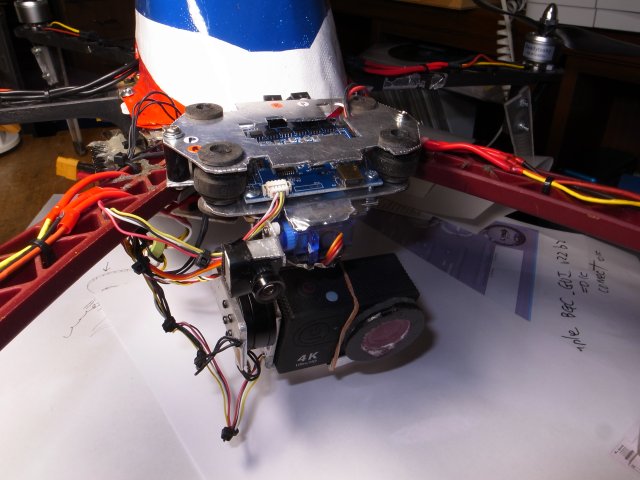
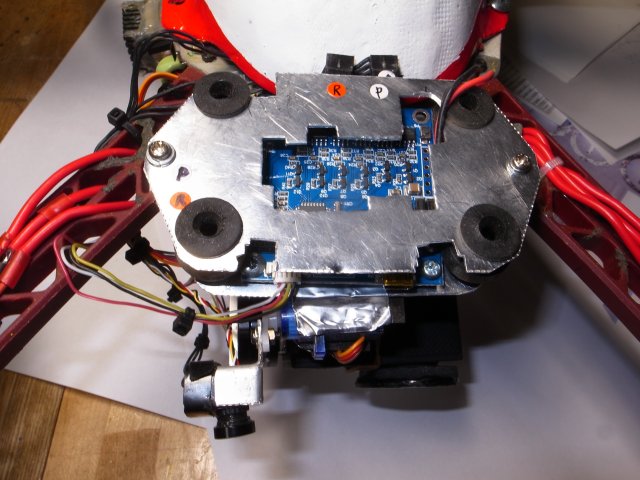
4-6 GIMBALの取り付け
2021/03/10 基板交換
GIMBAL ERR 基盤について
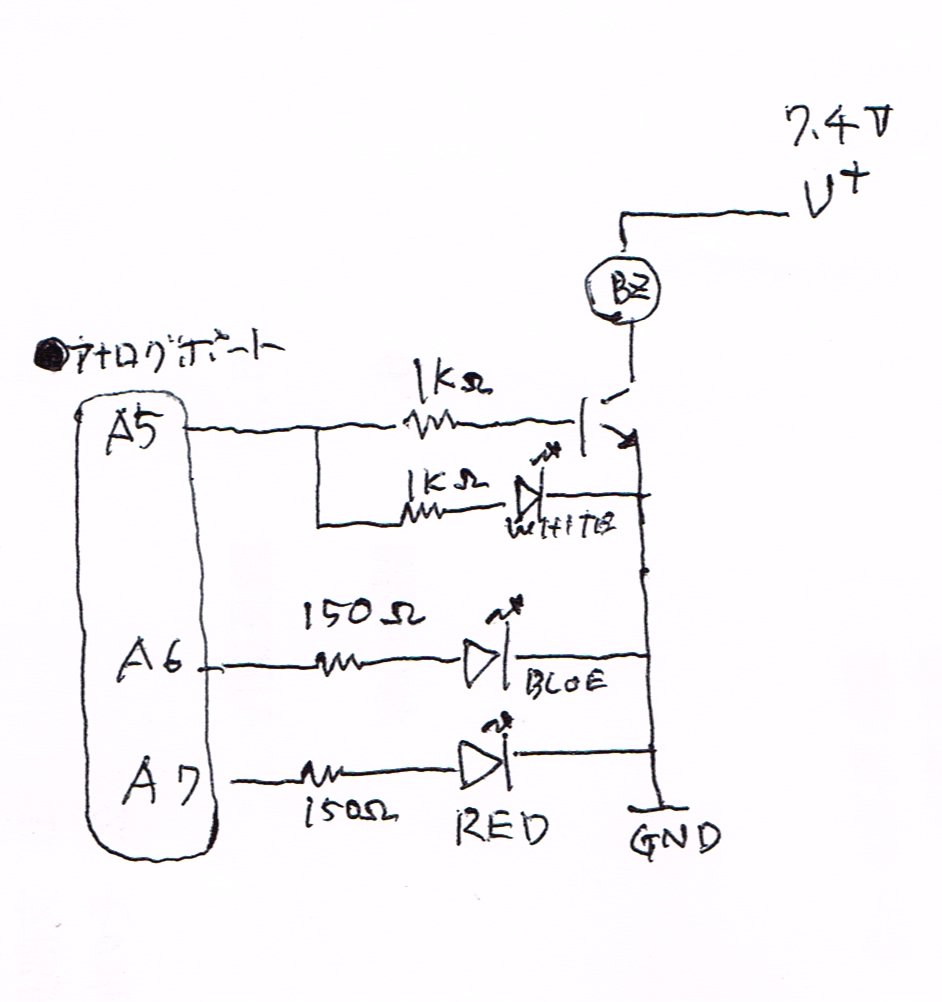
4-7 LEDブザーユニットおよびブザーの取り付け
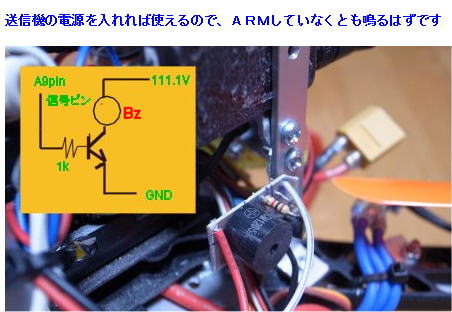
ブザーは送信機で発音をができるので万が一の時に位置を知らせる意です
4-8 超音波センサーの取り付け
音波センサーの改造
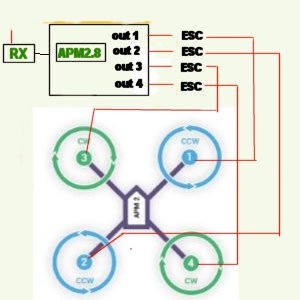
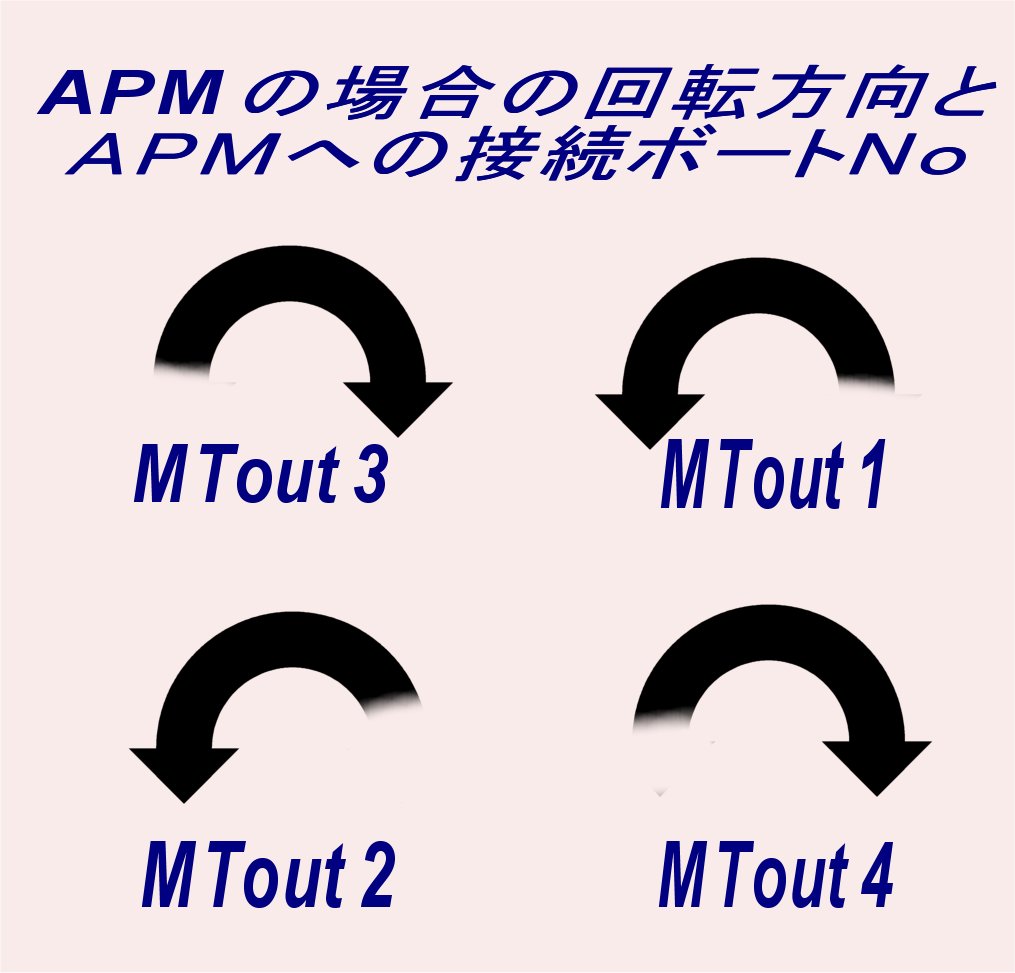
4-9 APM-ESC-MOTER の取り付け
モーター番号と回転方向
4-10 FPVカメラのチルトと投下装置
4-11 APM2.8の内部基板 裏表
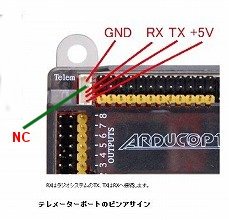
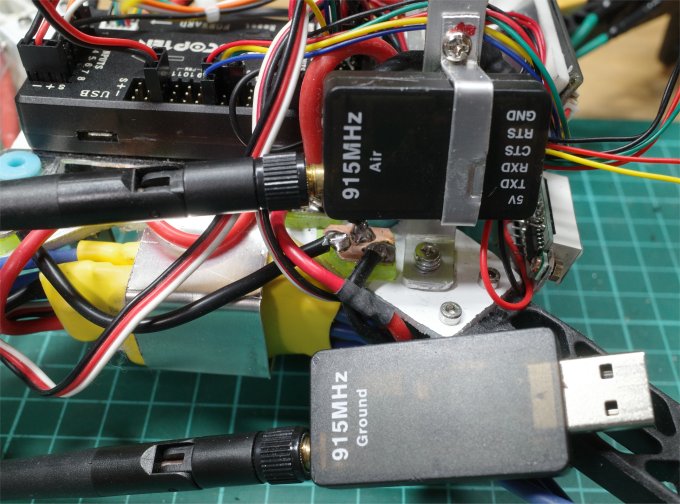
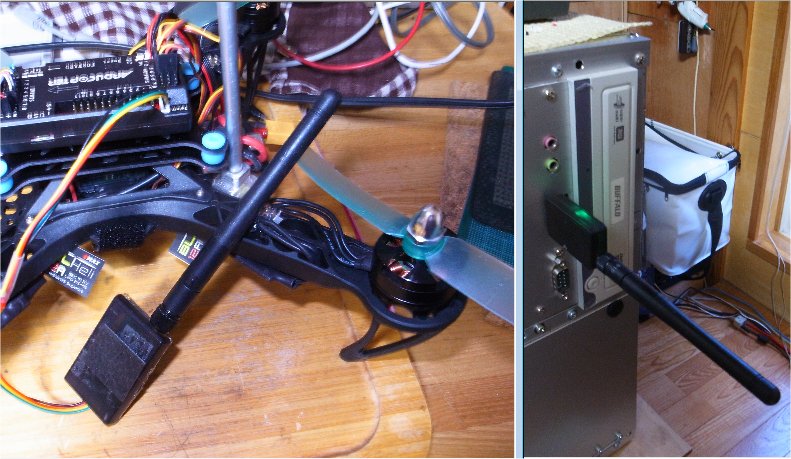
4-12 APMにテレメータを付ける
テレメータは、飛行中でデータを見たり、机上でコンパスの設定を行う時に便利です
4-13 FS-TH9Xにスロットルカットを割り当てる
5.ソフトウェアーのインストール
6.ファームウェアーのダウンロード
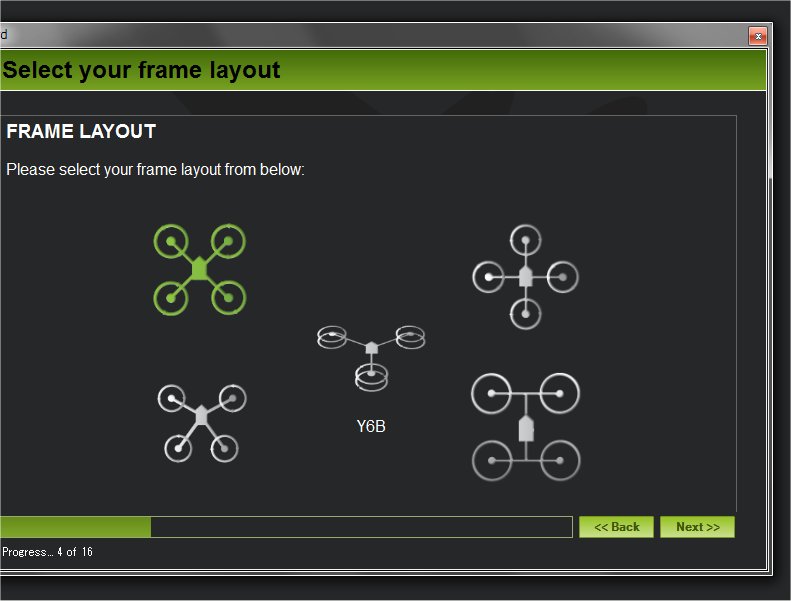
6-1 ファームウェアーの選択
6-2
7.初期設定
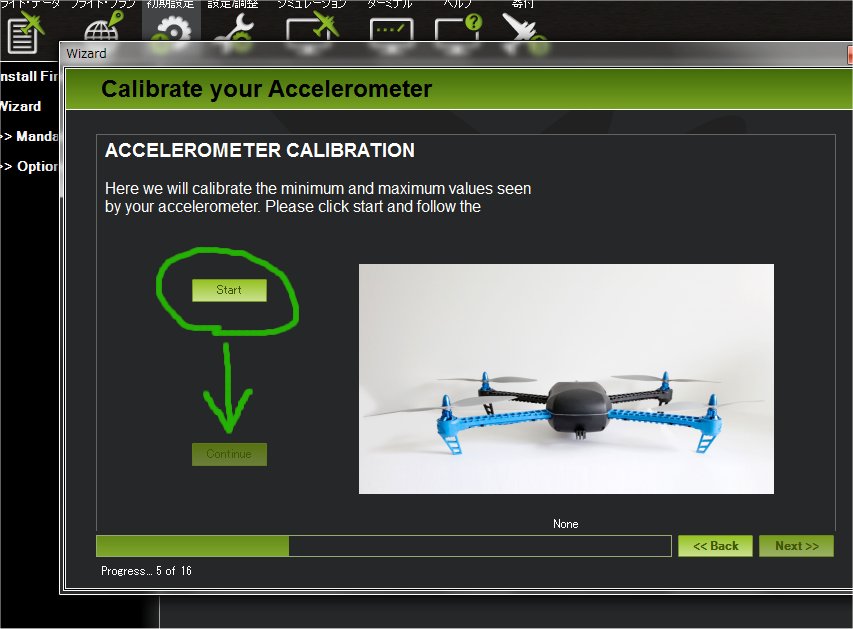
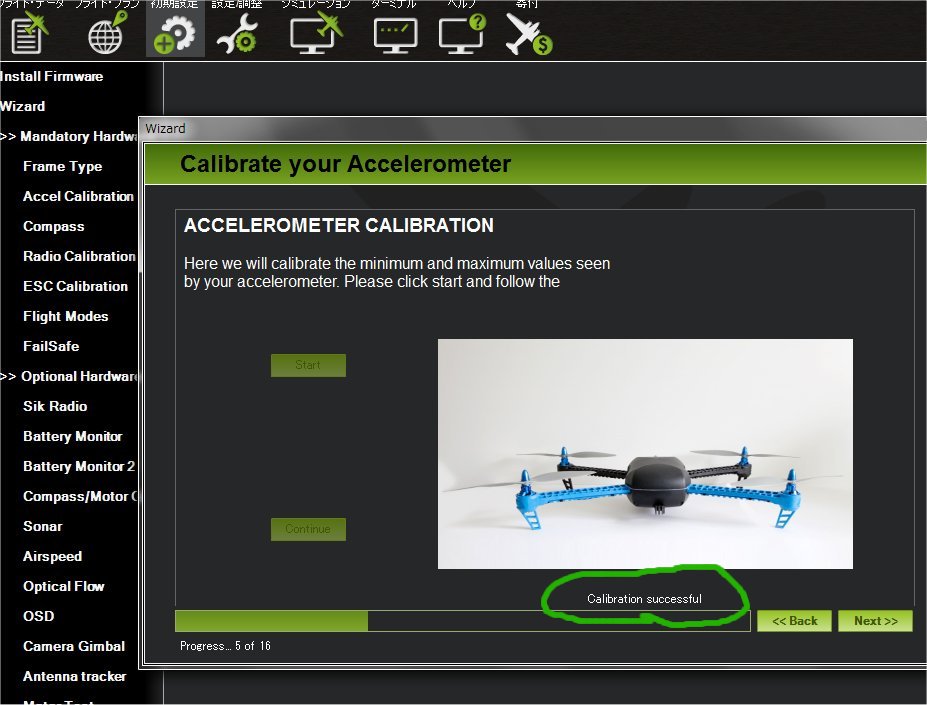
7.1 加速度センサーのキャリブレーションをする。
8.設定調整
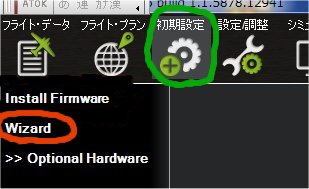
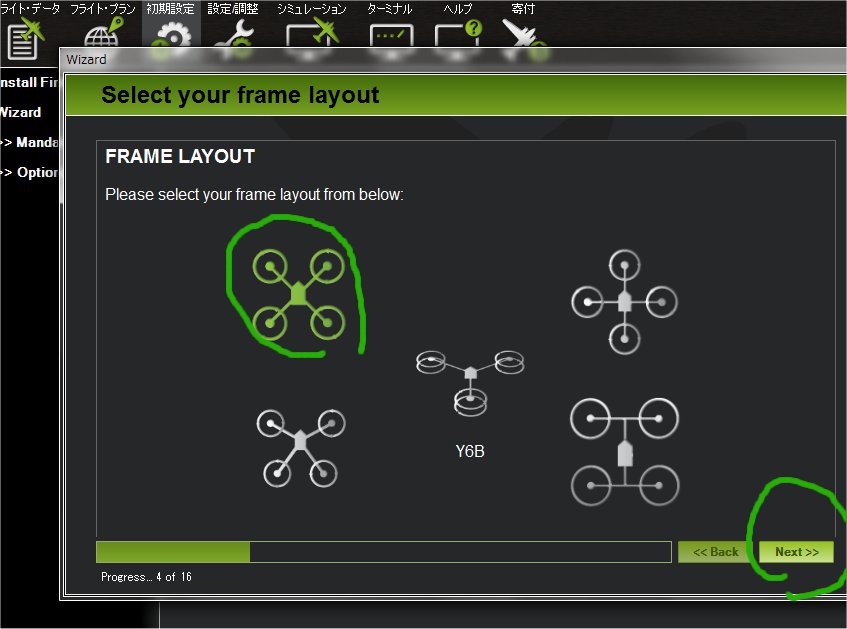
8-3 初期設定とウィザード
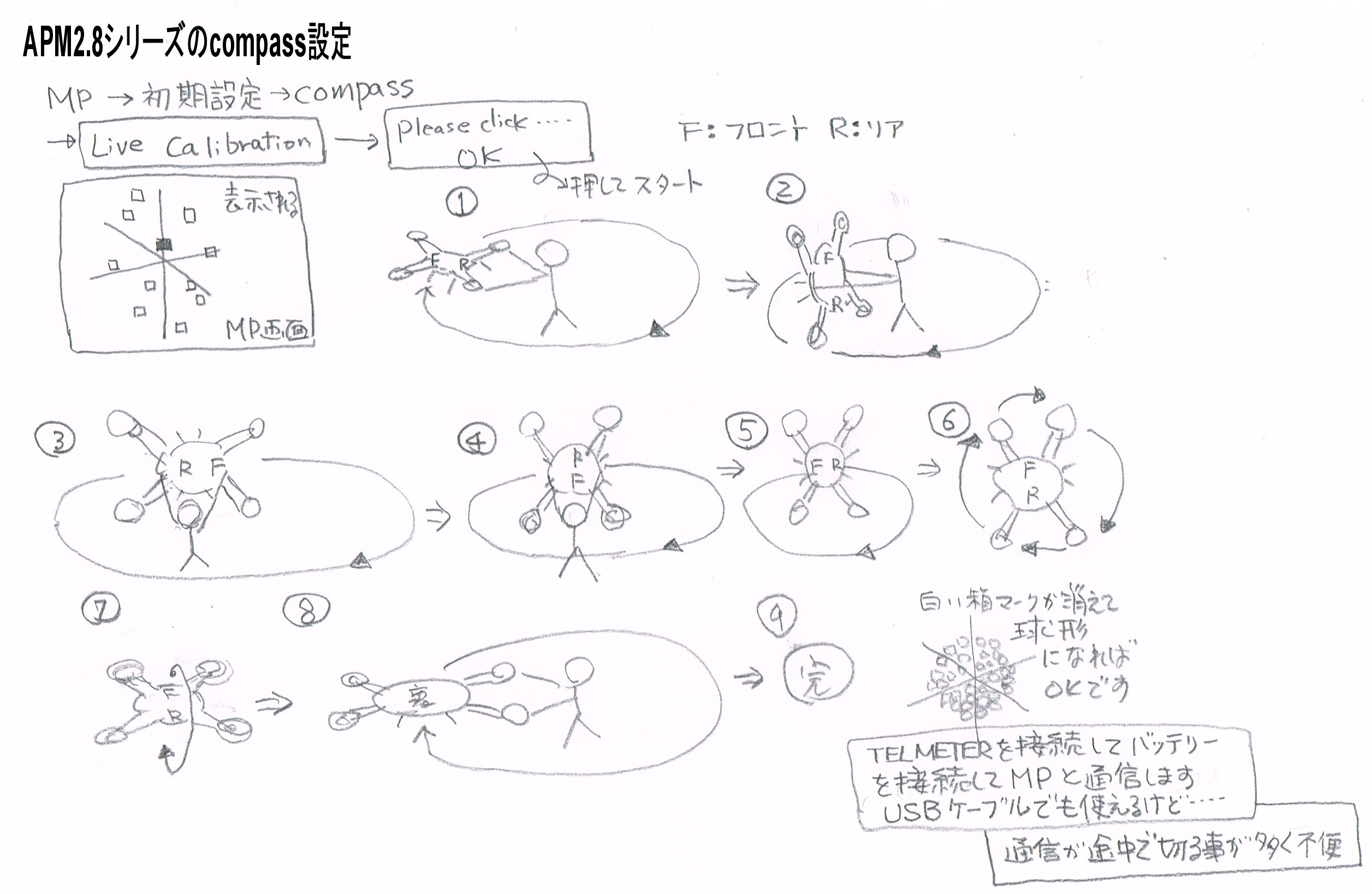
8-4 コンパスの校正
8-5.BEC バッテリーモニタの設定 (電流値の校正)
バッテリーについての私の評価
劣化バッテリーでの飛行
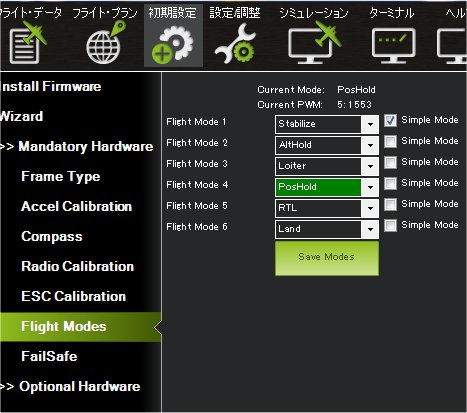
8-6. フライトモードの設定
8-7 飛ばし方について
8-8 フルパラメータの最小限の設定
8-9 PIDの設定(ハンチングを発生する時)
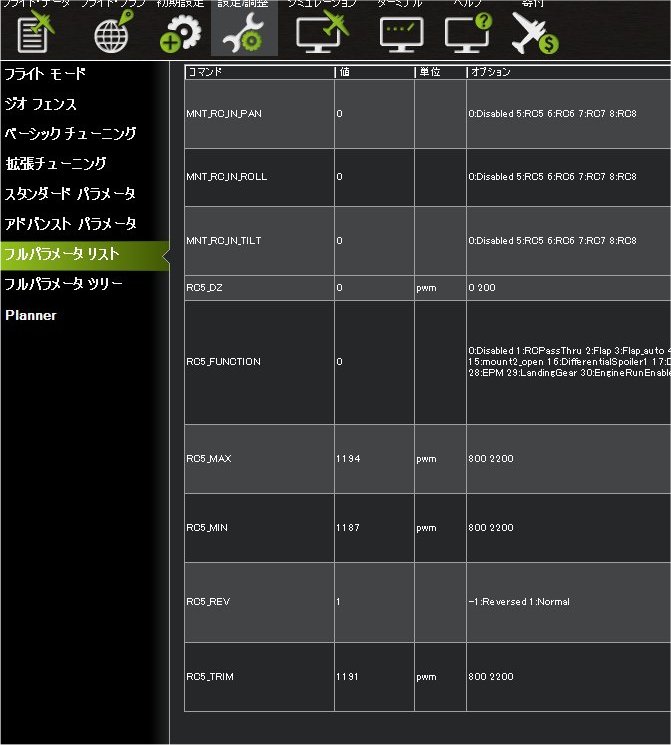
8-10 フルパラメータリストを表示方法
9-1 ESC モーターの校正
9-2 電圧、電流値の校正
10.その他、注意事項
ミッションプランナーの警告音声
(参考動画)ミッションプランナーで飛行ログを見る方法
11.トラブルと対策
高度低下,EKFのエラー,その他
11-1 バッテリーの限界電圧について
劣化電池のテストなど
12.モーターとプロペラ ハンチング
12-1 ハンチング
12-2 モーターのベアリングの取り外し
13.PWM発生器 モータなどのテストの必需品
14.DEVO 7Eとの接続
15.FPVカメラを更新したけど
16.FLYSKY 送信機と受信の関係
17.フライト電圧データとバッテリーに関してログ
18.その他製作品および製作途中品
18-1 F200QUAD
18-2 F130QUAD
18-3 F500QUAD
19.FS-TH9Xのレバーユニット交換
20.FS-iA6BとFS-i6X
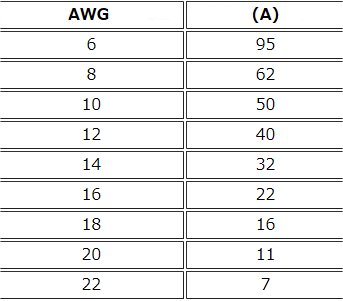
21.リード線の太さ表記と電流値
22. F5545のリフレッシュ
23. 電源プラグ色々の型式と名称
24. JSTプラグの配線交換
1. トピック
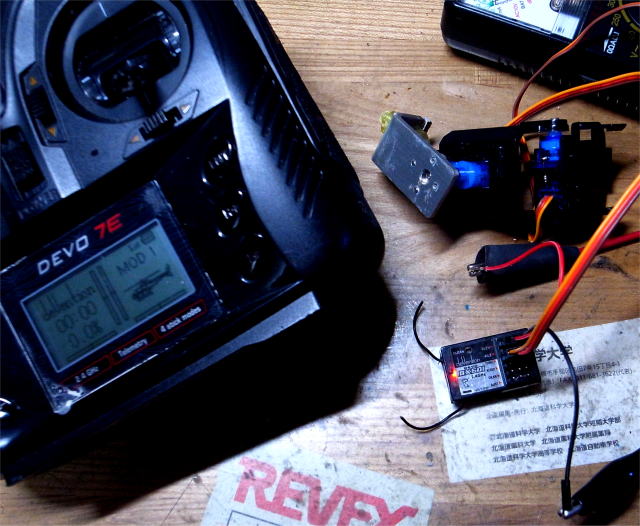
F200MK2の送信機をDEVO7に変更する作業 2019/11/19
送信機と受信器のバインド方法
DEVOはバインドコードを繋いで、電源を両方入れればOKになるはず、バインドコードを抜いても電源OFF
FLYSKYはバインドコードを繋いで、裏にある送信ユニットのボタンを押しながら、電源を入れる。コードを抜いて
電源OFFです。受信器は1セル、もしくは5Vのはずです12Vは使わないように。
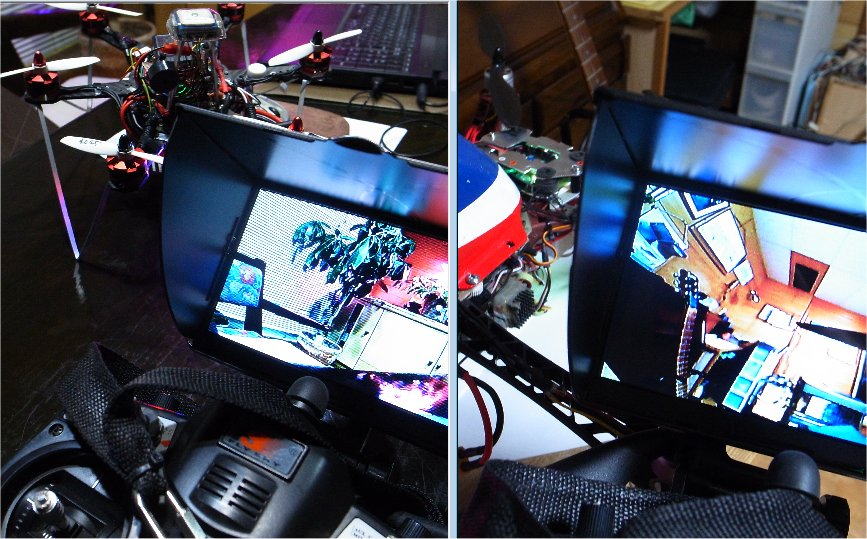
持ち運びに便利なDEVO7に交換、レシーバを交換完了したが、少なくてもフライトモードの切り替えをボリュームに
割り当てたい。出来ればロータリースイッチに変更出来ればよいのだけどね。
RX-DEVO7の配線は、別記の配線図通りでOKのようです。


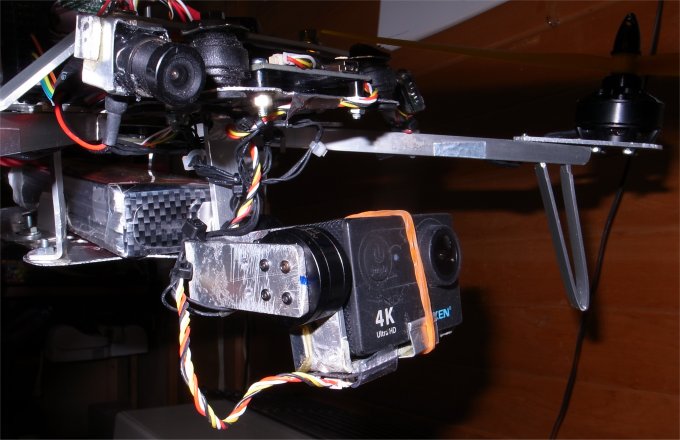
フロントにはカメラを取り付けられるよう、RXをサイドに移動した。
電圧計、DEVO7送信機対応のRX601受信器、
まだ、DEVOの設定方法が詳しく判りません。 EKENカメラホルダー取り付け
機体の設定はミションプランナーの初期設定からやり直す方が
フライトモード変更出来るようになりました。
間違いないかもしれないね。
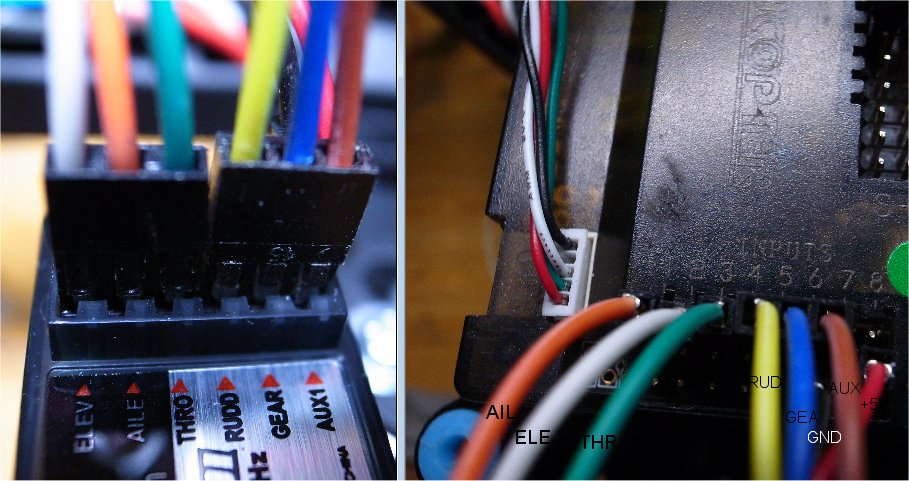
APMと受信器の配線
ELE-->APM CH2
ALE-->APM CH1
THR-->APM CH3
RUD-->APM CH4
GEAR->APM CH5
AUX2->APM CH6 (APMに接続せずサーボモーターに接続するとMIXSWで動作する)
DEVO7の設定
SW/On ENT(FUNCTION) ENT REVSW ENT
ELE=REV (R or Lで選択) DNを押す
ALI=REV (R or Lで選択) DNを押す
THR=NOR (R or Lで選択) DNを押す
RUD=REV (R or Lで選択) DNを押す
GEAR=NORM(R or Lで選択) DNを押す
FLAP=NORM(R or Lで選択) DNを押す
GYRO=NORM(R or Lで選択)
フライトモードを変更するようにするには、GEARを使いたくなかったが、それしか、今の所見つけられない。
SW/on - ENT - R(MODEL)にする 画面上に小さく表示されている
system-model-function と切り替わる
Lを9回押して OUTPUT に合わせる ENT GEAR/GEARと表示されていたら
(R/Lを押して)GEAR/AUX2に切り替える
EXIT出抜け出す
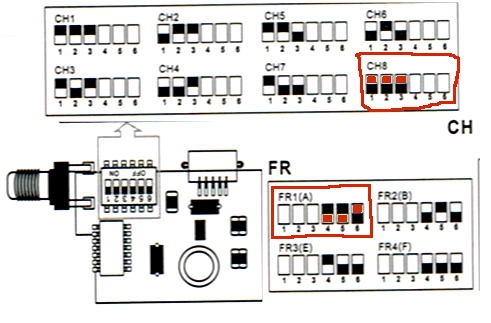
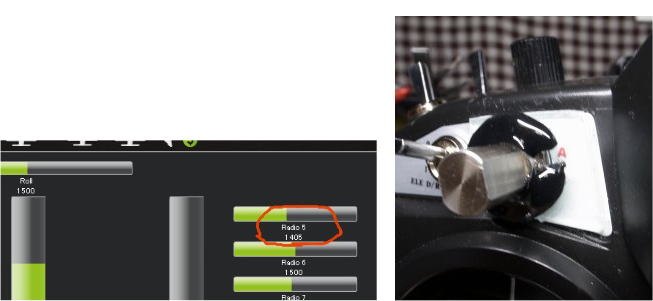
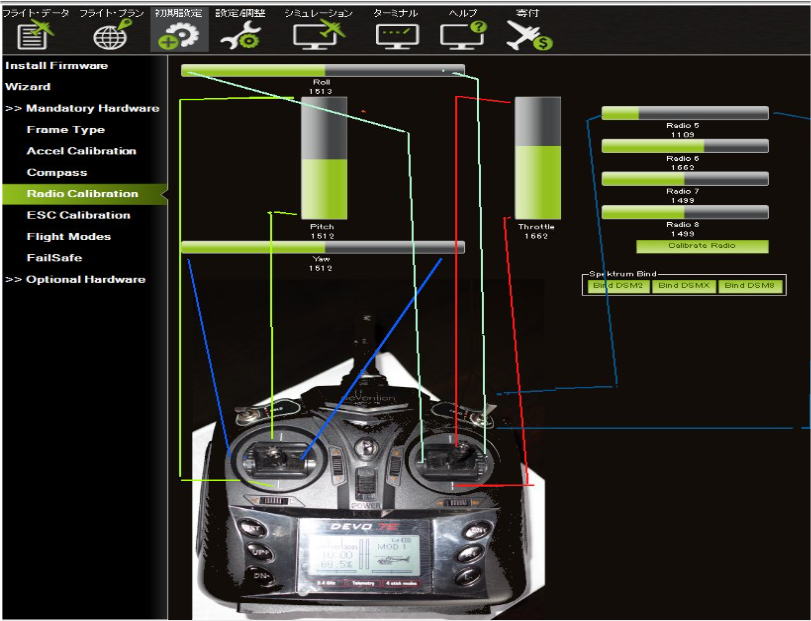
これで、ミッションプランナーのフライトモードの画面で、ボリュームを回すと、モードの表示が下に降りていきます。
ミッションプランナーのフライトモード画面を見ながらボリュームの位置に印しを付けていきます。
写真左下
写真右下 受信器のCH6にサーボモーターを取り付けMIXSWで3ポジションの動作が出来ます。
あるいは、受信器のCH6 とAPMのinput CH6を配線して
DEVO7のMODEL-INPUT-FM SWをMIXに設定すると、MIXの3ポジションスイッチ 0-1-2 に位置に対して
Mission planerのradio6 が変位しますので、何か別な物に使えそうです。
APMにはCH7とCH8 OPT設定があるがCH6は無いので、radio6が動いても、アナログCHに取り出す方法が、判りません。
受信器のCH6 とAPMのinput CH7を配線したらAPMのCH7 OPT設定で使えるかもしれない。
Ch7_OPTに 28
RELAY PIN に 13
これでA9ピンにON OFFの+5Vが出るかもしれない。実験していないので不明
下の4-7-2を参照してください。


2.制作前の準備事項
パーツの入手方法
私はAliexpressで中国から輸入してます。Banggood や Gearbest も利用しています。
クレジットカードがあれば簡単に手に入りますが、到着まで時間が掛かります。
バッテリーはAmazonから安いのを買う方が良いかも(少し高いかも)
個人輸入でトラブルは殆どありません。1度だけ届かなかったのがありましたが、払い戻ししてもらいました。
英語の苦手な場合は翻訳ソフトで、適当に書いても意味は通じると思います。
バッテリーを3Sにするか4Sにするかなど電圧を決めておく。それに従ってモーターとESCも決まる。
3Sと4Sの大きな違いは、同じ電力を消費するモーターへの配線を細くできることで、飛行時間には関係ない
と思っていたが、電圧の高い方が効率が良いと言うことを耳にした。
2.1 送信機と受信 FS-TH9X FS-R9B
最新のものは、素晴らしいのがたくさん出ているらしいです。
一度買うと、別に不便はないので、そのまま使ってます。
LCDのバックライトを注文したらそのユニットの
半田がブリッジしていて、送信機から煙が。。。壊れたかと思ったが無事でした。厚手のアクリルに横からLEDを
埋め込み自作しました。 バインドーブルを接続した状態

送信機FS-TH9XにはLED照明と6フライトモード切り替えロータリーSWを付けた FS-R9B受信機
送信機裏の送信ユニットRM-002をRM-003に変えると別の受信機に対応できるようだ。
送信機と受信機の接続設定

送信機の後ろの 丸いボタンを押しながら電源を入れる。
これで完了です。送信機、受信機の電源OFF にして、ショートプラグを抜いて使うだけです。
FS-R9Bも全く同じ。 ショートフラグは受信機付属してますが、自分で作っても問題なし
バインド方法



FS-RM003 FS-RM002
FS-RM003 は受信器 FS-iA6B との接続に使う
送信機は FLYSKY FS-TH9X 受信機は FS-R9B この組み合わせは間違いない。
最新の受信機は送信ユニットを変更すれば使えるようです。
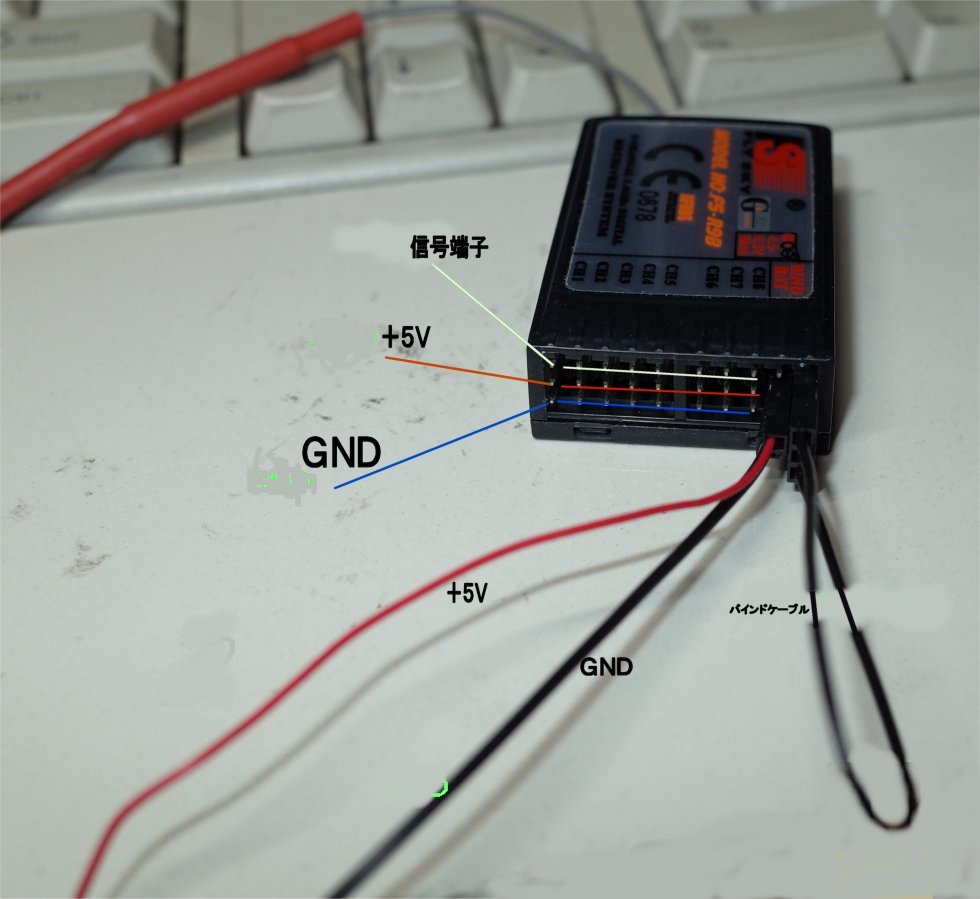
上右のようにバインドケーブルを右端に差し込んでから、電源5VとGNDをつなぎます。max8.4Vまでくらいです。
送信機の裏の丸いボタンを押しながら、電源を入れます。これで、送信機と受信機の結合状態になります。
バインドケーブルを抜いてからOFFにします、送信機、受信機ともに。
バインドケーブルは信号端子とGNDがつながっています。5Vは 1Sのバッテリーでも使えるはずです。
私は定電圧電源を使ってます。電圧と端子を間違わないように。
DEVO7と受信器のバインド方法
とっても、シンブルです。
1.受信器にバインドコードを取り付けて、電源+5Vを印加します。送信機の電源を入れると、受信器の赤いLEDが
点滅から連続点灯に変わります。
送信機の液晶画面の動きが止まったら完成です。バインドコードを外し、受信器の電源を切ります。
送信機の電源も切ります。以上です。
https://www.youtube.com/watch?v=meB3-GmQt8o
2-2送受信機間の通信方式
メーカーによってプロトコルが異なります。
メーカー プロトコル
1. FLYSKY FLYSKY
2. フタバ FASST S-FHSS T-FHSS
3. Frsky D16 D8
4. Spectrum DSM2 DSMX
5. Jumper FRSKY DSMX DSM2 S-FHSS
JUMPERのようにマルチプロトコルモジュールを使っている物は違うメーカーのものも、使えるようです。
3.必要最低限のパーツ
APM2.8シリーズについて
どうも、最近は ジャイロ内蔵と非内蔵の2種があるようです。
GPS BN-880もジャイロ付きと非ジャイロがあるようです。
値段の安いのは付いてないみたい。
APM2.8を買うときは付いたのが楽かも。
先日 Aliで極安のを買ったら 非ジャイロでしかも、故障中古品のようでした。
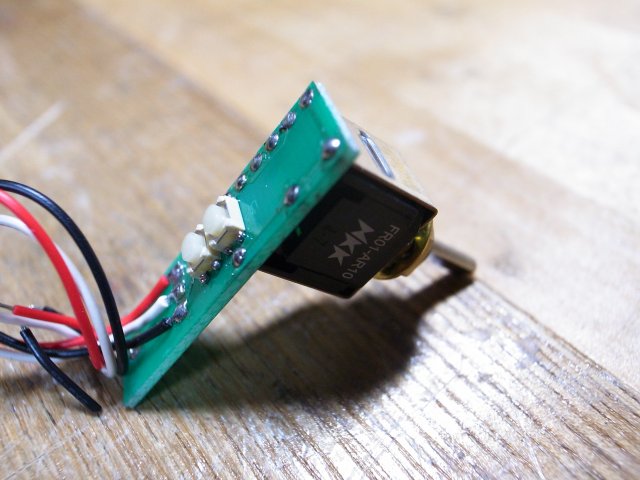
3.1 モーター4個 ESC4個 LEDとブザーのユニット1個

右がプロペラアダプタ方式のモーター 左は逆ネジのプロペラナットのモーター(右回転にする)
3.2 送信機とそれに合う受信機1セット6chあればOK
3.3 APM用のGPSユニットBN-880が絶対におすすめ
(GPSは無くても飛行は出来ますが、私は必須)
3.4 バッテリー1個 1000KV 11.1V/3Sなら
3500~4000mAH以上が良いかも。
3.5 プロペラ 8セットくらい必要かも 1045のナイロンでOK
3.6 機体のベースとアーム。市販品を買う方が簡単。慣れると、
アルミやカーボンで製作できます。
3.7 配線用のディストリビューションボードがあった方が良いかも。 アーム ディストリビューションB
アーム ディストリビューションB
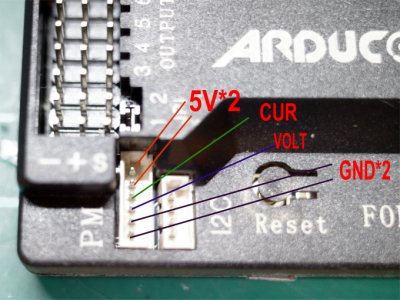
3.8 BECと言うバッテリー電圧を5Vに変換すると共に、
電圧、電流センサーの付いた基板が必要です。![]() BEC
BEC
モーターは1000KV以下にしておいた方が、安定した飛行が出来ると思う。プロペラも大きくしてゆっくり回した方が
能率が良くなり長時間飛行できる。PIDの調整に悩まされることはないと思う。
ミッションプランナーと言うソフトをダウンロードしておきます。これは必須ですマイクロUSBケーブルでPCと接続します。
調整に必要で機体を回すので3メートルくらいの物が良い。
機体プロペラは右回りと左回りのものが有ります。プロペラアダプタ方式のモーターは全部同じものでOKです。
3本線の内2本を逆につなぐと回転方向が反転するからです。
プロペラナット(キャップ)の色違いのモーターは取り付け位置が決まっていますし、回転方向は同じように合わせる必要がふあります。
戻る
4. 組み立て概要
私はまず、機体を組み立てて、APM,受信機、BEC、ESC、モーター、GPSなどを取り付けます。
機体はネジ留めがメインです。補記類は強力両面テープを使いました。配線にはタイロップなども有効ですね。
GPS BN-880はケースが無いので、アクリルなどを加熱してつくりました。(木に穴を開けて、少し小さい木を穴に押し込む)
GPSのアンテナはBECおよびESCなどからなるだけ離して設置します。
製作手順
戻る
4-1 受信機とAPM2.8間の配線
(標準の設定 基板などオプションを使用しない段階)
RX APM28
1 --------- 1
2 --------- 2
3 --------- 3
4 --------- 4
5 ---------
6 --------- 5 FLIGHT 3 MODE SW 送信機のモードスイッチ 詳細は下
7 --------- 7 GEAR SW AnalogPin 9ch on off 詳細は下 トイクアッドのカメラ ON/OFF
8 ---------
9 ---------
現在の設定
* 現在 6フライトモード切り替え基板を使っているのでCH5->CH5にしている
受信機のCH6はそままサーボモーターへ接続 投下装置として使っている
RX APM28
1 --------- 1
2 --------- 2
3 --------- 3
4 --------- 4
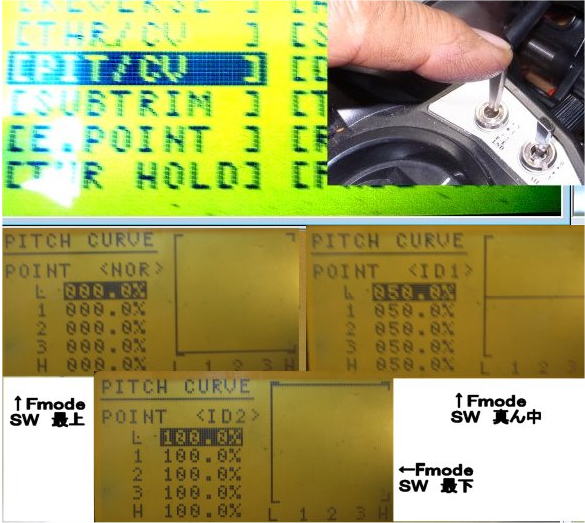
5 --------- 5 FLIGHT 6 MODE SW として使用 (FS-TH9X CH5= PIT TRIM 0% 50% 100%に設定)
6 --------- サーボモーターへ 詳細は下 (APMには配線しません) 投下切り離しやFPVカメラの角度変更
FPVカメラ 前 45度下 真下
7 --------- 7 (s線のみ) GEAR SW AnalogPin 9ch On Off 詳細は下 トイクアッドのカメラonoff
もしくはブザー
8 ---------
9 ---------
*CH7 トイカメラ or BZスイッチ動作をさせる設定
RX.CH7 ---- APM CH7 を接続 手前のレバーを動かしているときだけBzがなる
MissionPlannerにて設定必要
Ch7_OPTに 28
RELAY PIN に 13
信号線だけの接続でOK apmのアナログピン A9に出力されます。
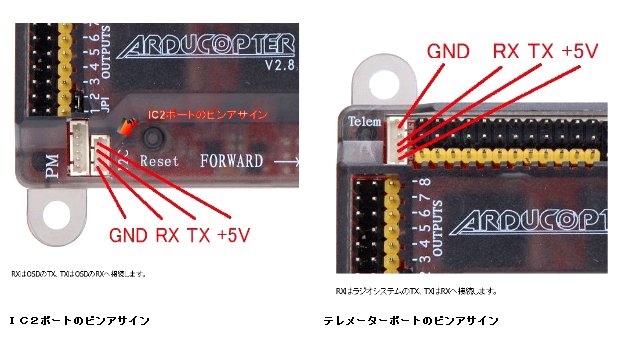
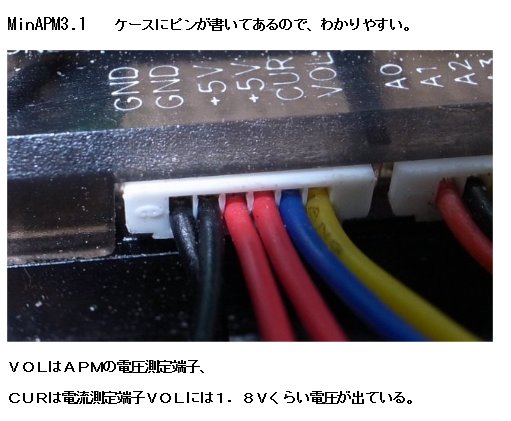
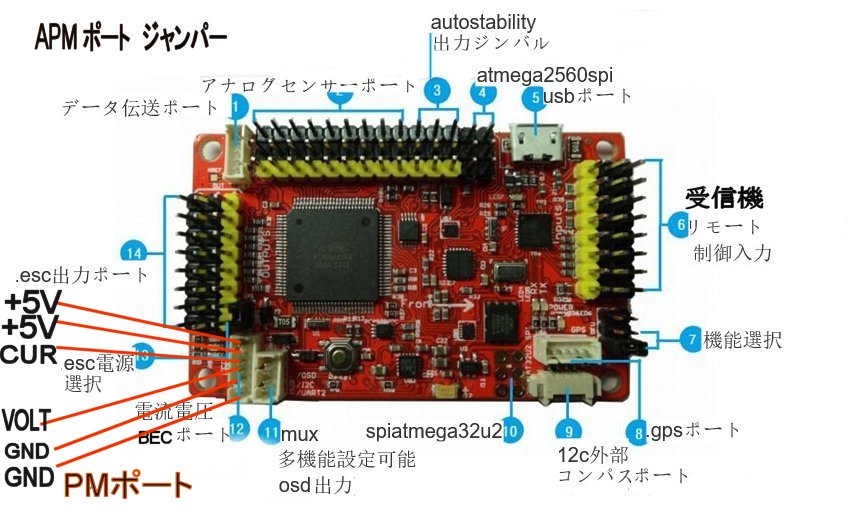
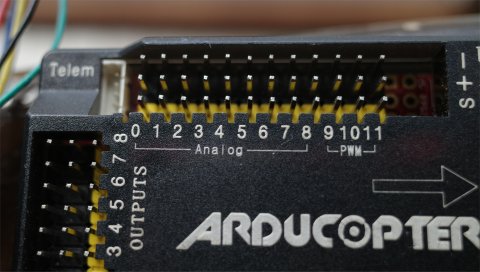
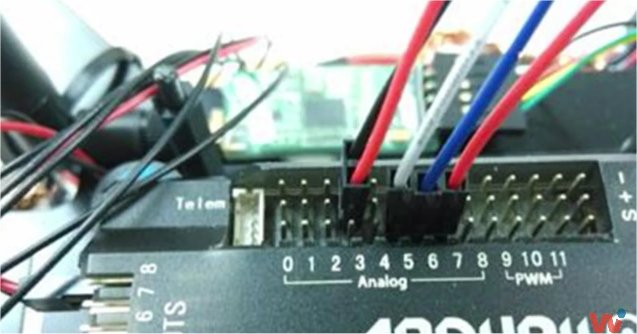
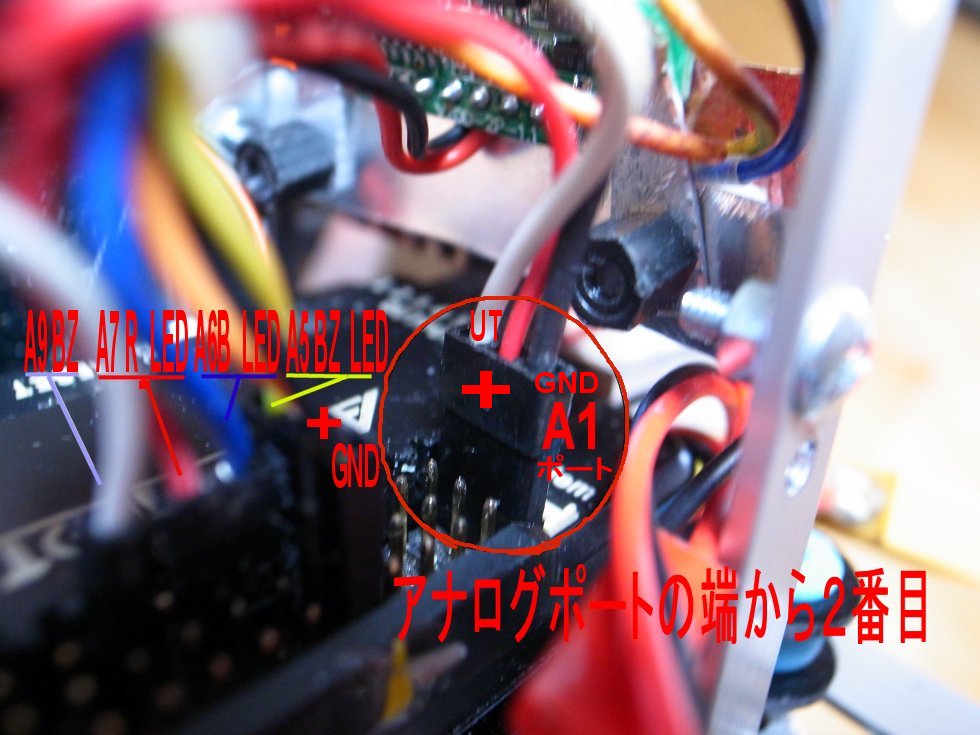
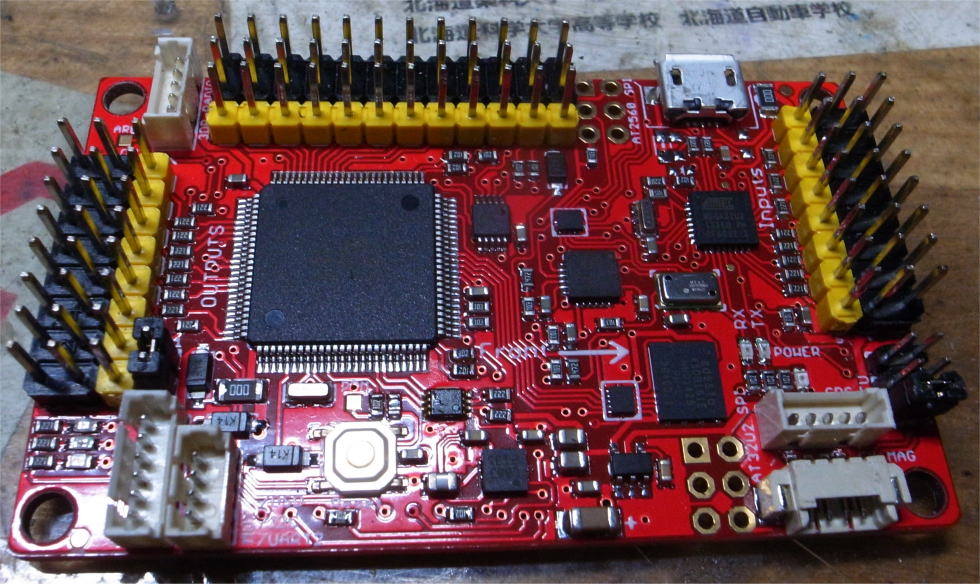
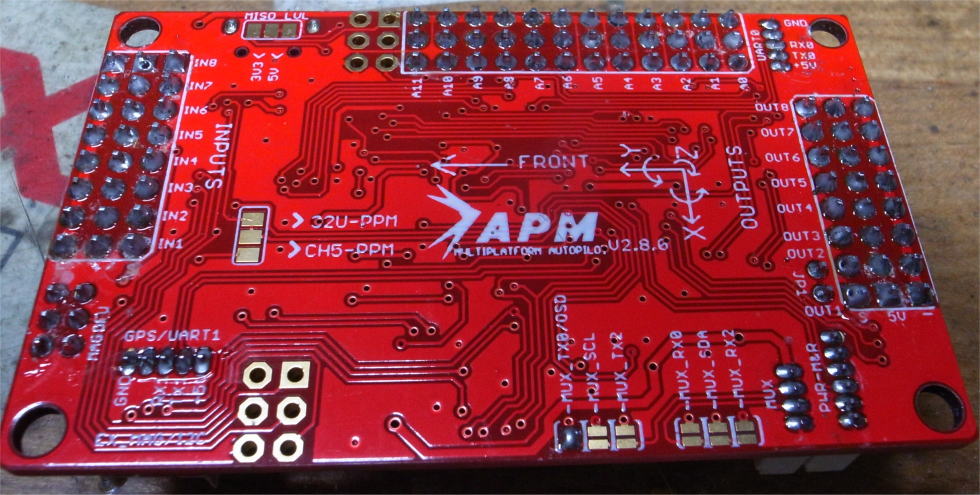
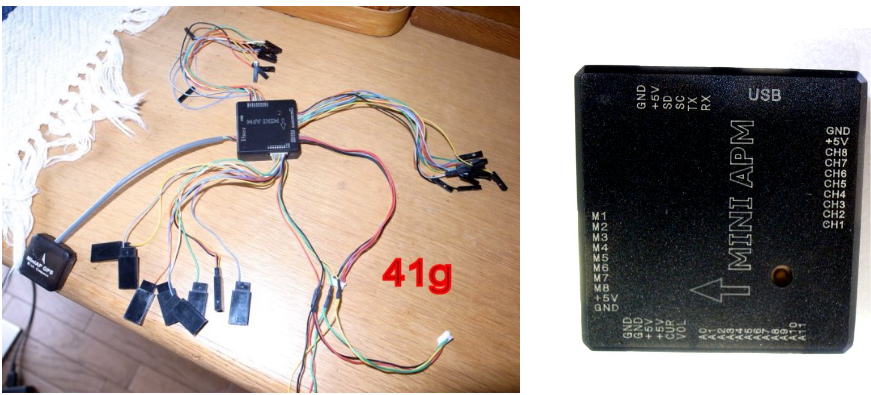
4-2 APMのピンアサイン
APM2.8 電源ピン APM3.1 電源ピン

アナログポートはLED BZの接続です。 4-7 を参照のこと

MinAPM3.1とDEVO7E送信機のRX701を接続する時は

RX701 MINAPM3.1
1 ele --------- 2 1ch-2chを接続します いわゆるクロスにします。
2 aile--------- 1
3 thro---------- 3
4 rudo---------- 4
5 gear---------- 5
6 aux1-----------6
DEVO RX006 - APM2.6/APM2.8
戻る
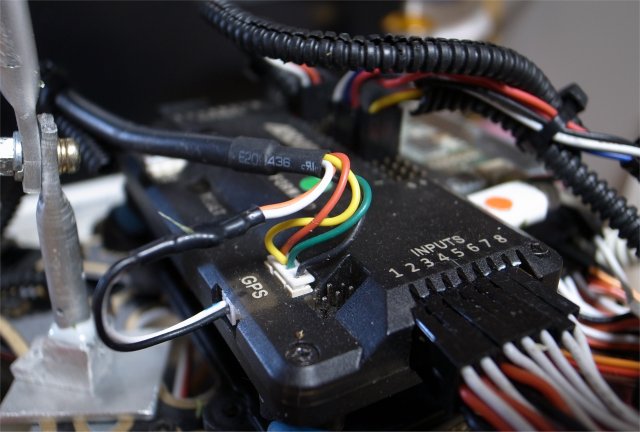
4-3 GPS 取り付け
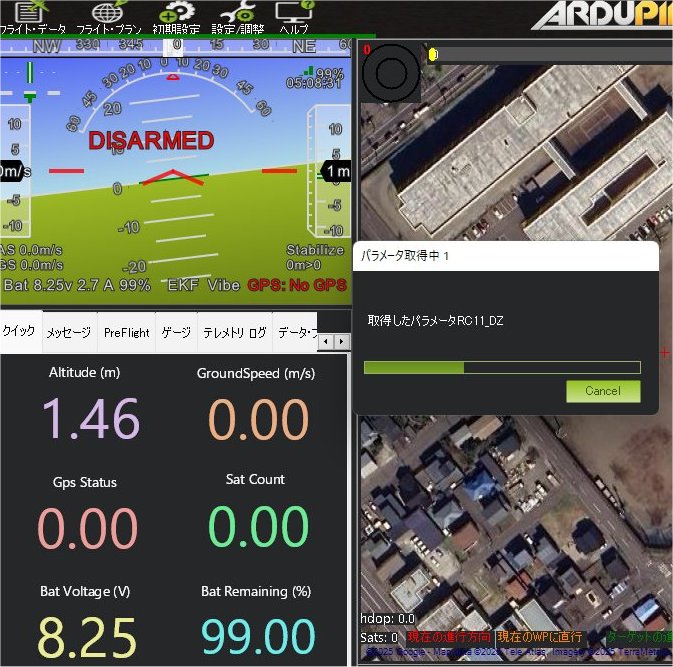
特に設定などは見つからない。とにかく接続されていれば良いみたい。補足に少々時間が掛かる。
STBモードで、コネクトになっていても、一度 接続を解除して POSもしくはLOTモードにコネクトした方が
安全かもしれない。
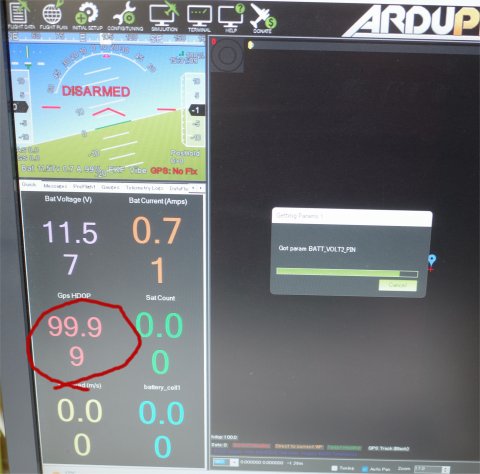
USB接続のMP画面には NO GPSと表示され、接続すると、部屋の中では NOT GPS FIXとなる
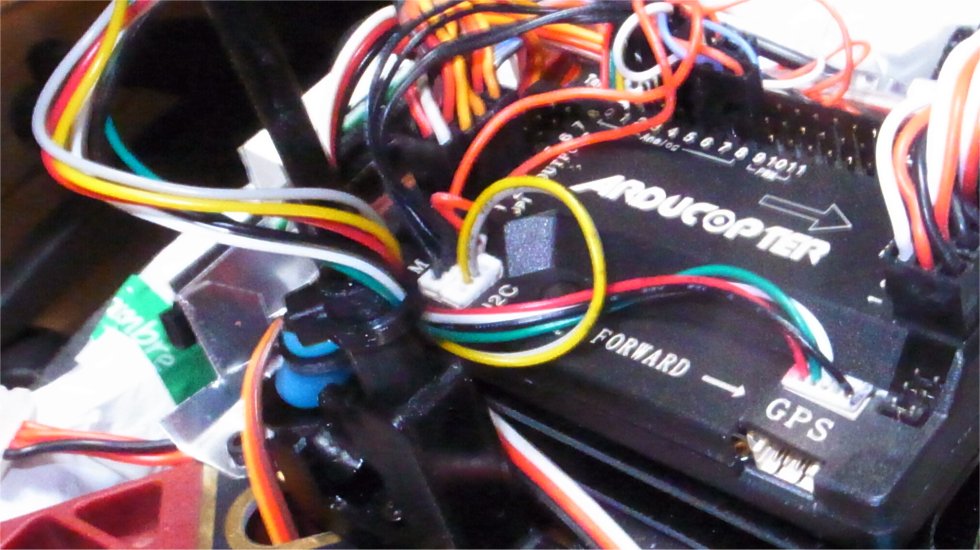
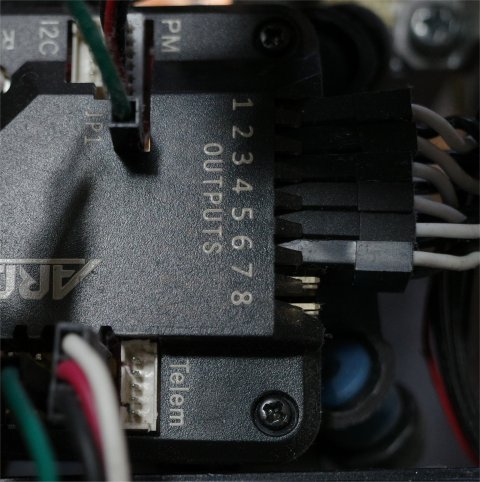
APM2.8・APM2.6
APM2.8は写真のように取り付けます。APM2.6は
PM端子の隣のI2Cとなっている場所に差し込むようです
APM2.8 LONG APM2.8 SHORT
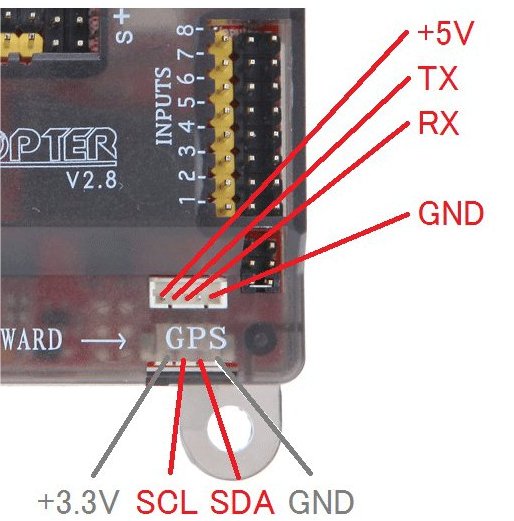
APM2.8のLONGタイプは下のポートを使う SHORT タイプは SCL SDAはI2Cポートを使う
サイドピンと言うかも IC2のポートは下の図のAPM2.6と同じです
APM2.6 APM2.8 新しいショートタイプ(ストレートピンタイプ)
(APM2.6のようなタイプ)
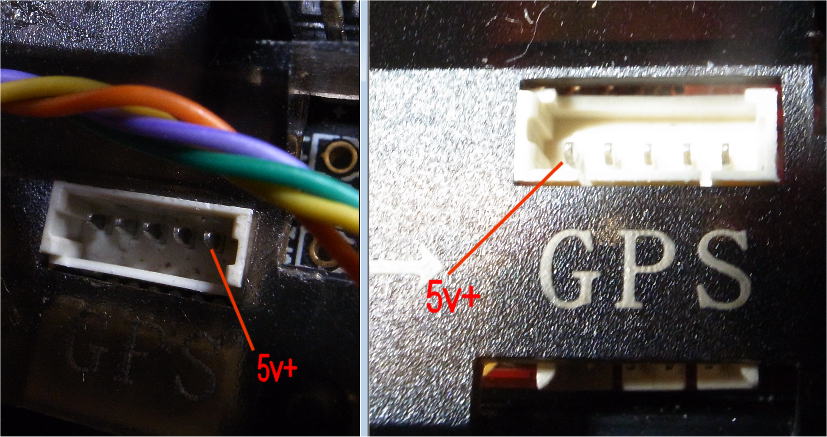
ピン配列が内側 ピン配列が外側
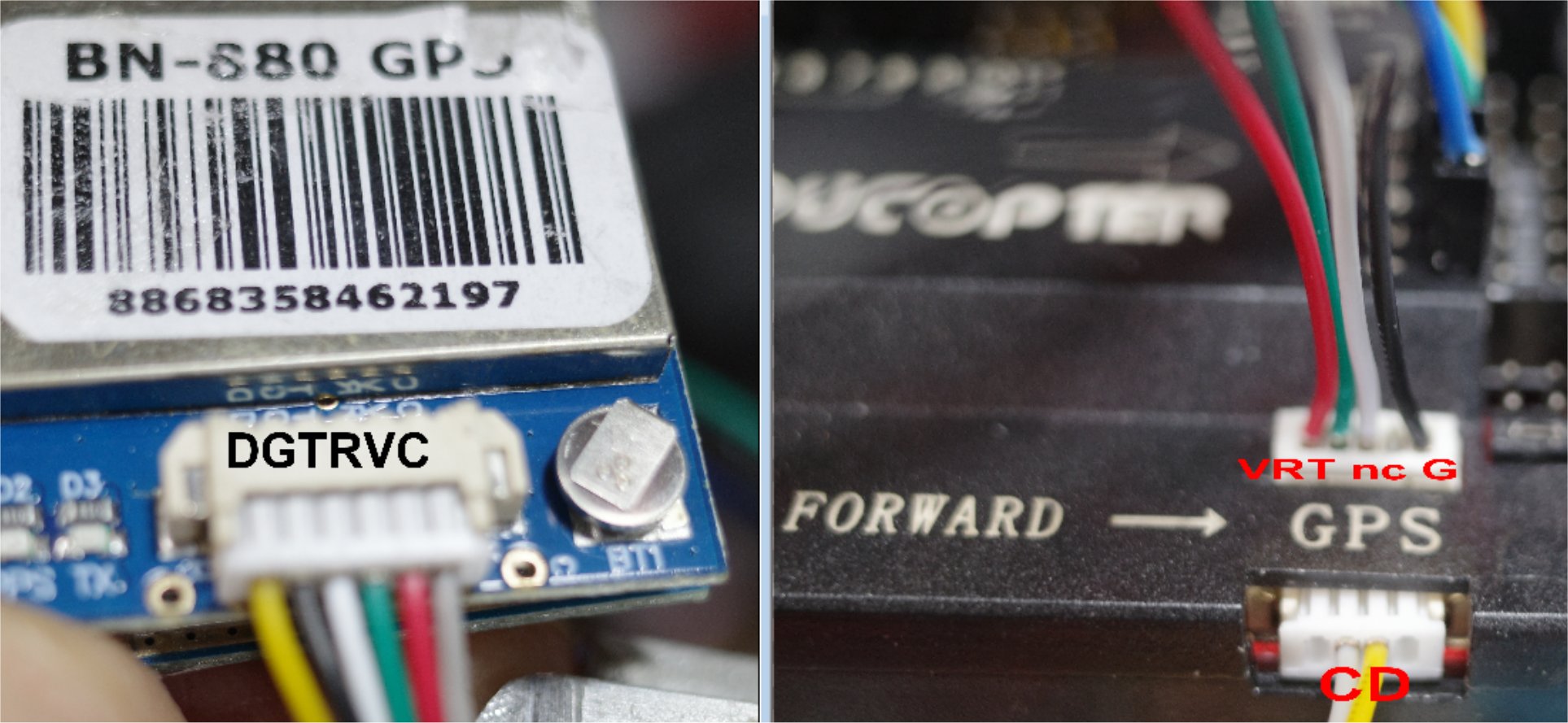
BN880をAPM2.8ストレートピンタイプへの配線
ショートタイプのAPM2.8は APM2.6の用にI2Cを使います ピン配列が外側
ストレートピンタイプと言うかも

BN880 I2C端子 GPS端子
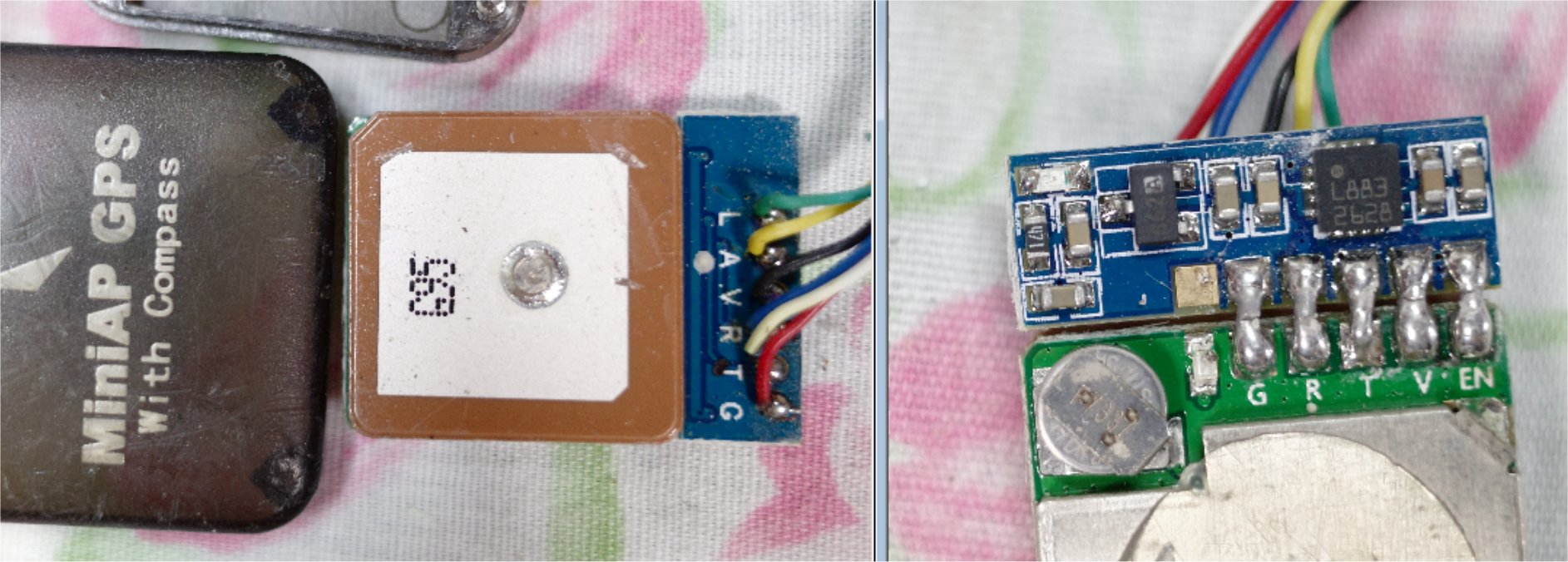
下は MinAP GPS と書かれている小型のGPS 現在壊れている。
どうしてGNDに赤いリードなのか不明。GNDが赤ということですが 基板のうらでTXがRXになっているので
ストレート接続でOKのようですね。
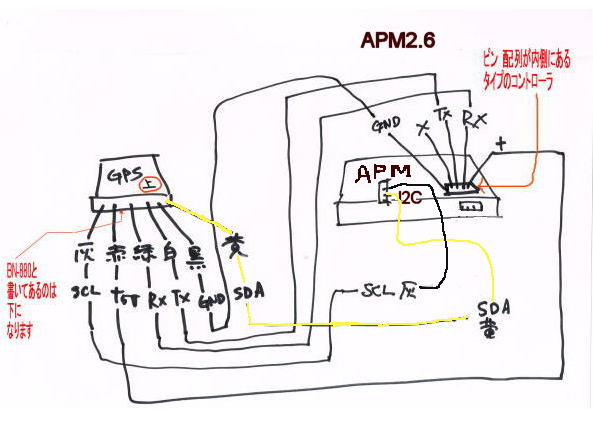
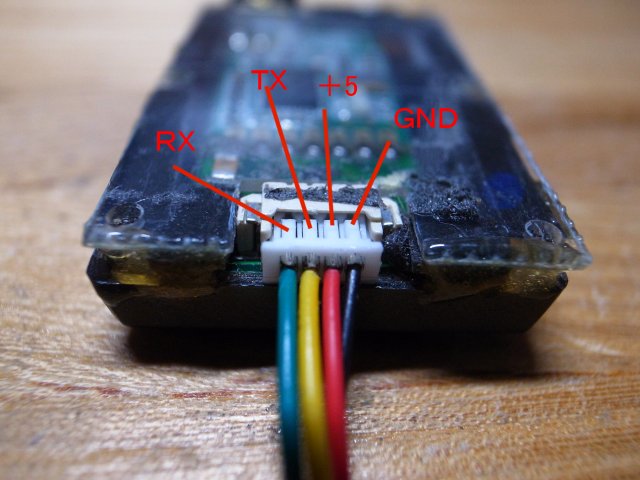
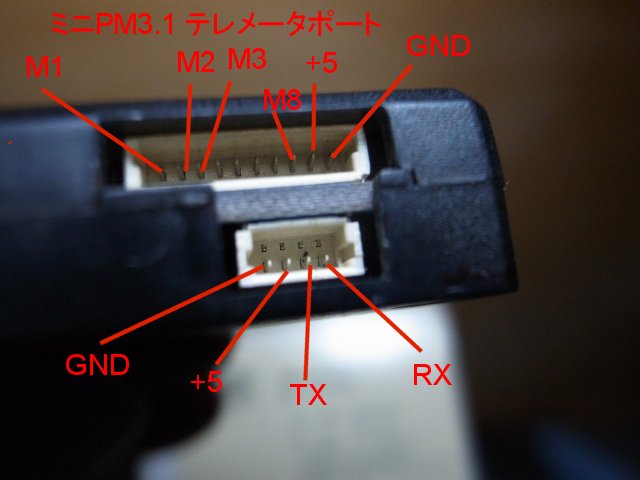
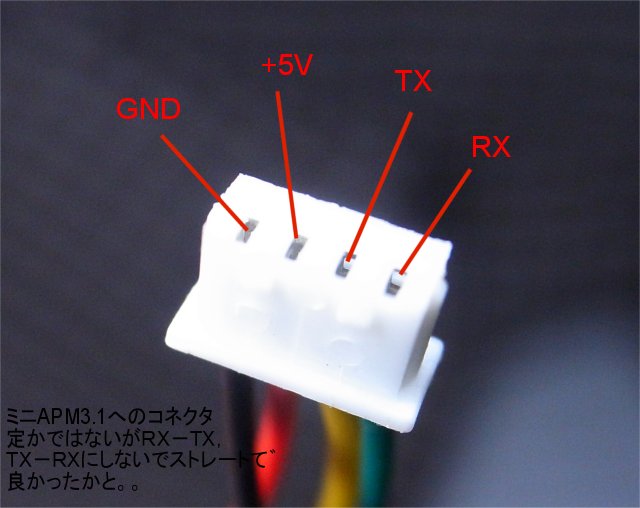
ミニAPM3.1 の場合
APM3.1のPMはBECのコネクタとは、位置も、ピンピッチが違います。

APM3.1のモーターポートの+5Vには給電の必要は無い
このコネクタは接触不良を起こしやすいので注意が必要です。解決方法き見つからない。
↓裏面になります。


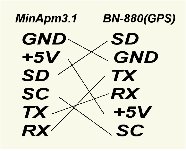
専用の配線コネクタが無い場合、製作するのだがMinapm3.1とBN-880を接続するにはTXとRXはクロス接続です。
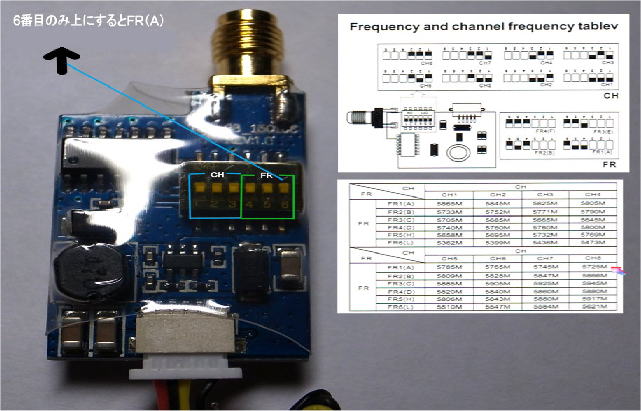
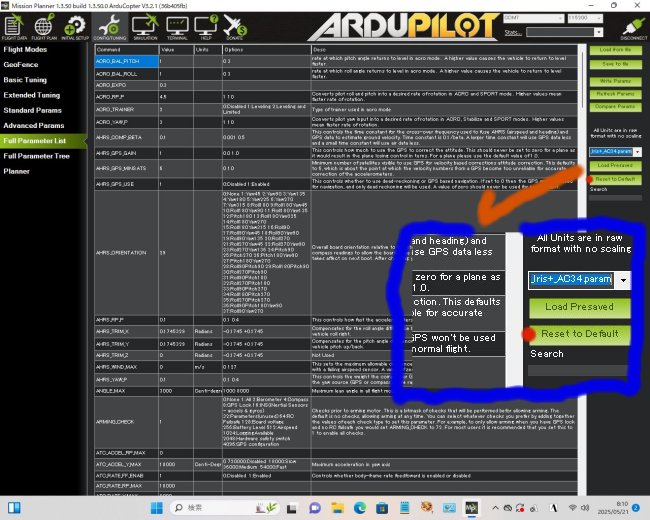
写真上右端のように外部設定にするとGPSを受信する
 k
k

















[RNGFND_FUNCTION] = 0 ; リニア入力
[RNGFND_GAIN]
= 2 ; 感度
[RNGFND_MAX_CM] = 300 ; 3mまでソナーを使用 現在はユニット変更で500に設定
RNGFND_MIN_CM] = 0 ; 0mからソナーを使用
RNGFND_OFFSET] = 0 ;
オフセットは無し
RNGFND_PIN] = 0 ;
アナログ入力"0"に入力
RNGFND_RMETRIC] = 1 ; メートル法
RNGFND_SCALING] = 2 ; スケール 1V = 1m 実際に機体を手に持って動かし正しい距離
になるように調整するべき
RNGFND_SETTLE_MS] =
50 ; 50msecおきにデータ更新
RNGFND_STOP_PIN] =
-1 ; アナログ入力"0"はデジタルピンにしない
RNGFND_TYPE] = 1 ; ソナーのタイプは(0-4)ですが
アナログなので1になる 上記でも設定
書き込みボタンを押す
中国製のソナーユニットは以前から、あまり、役に立たなかったので。付けては外しを行ってていた。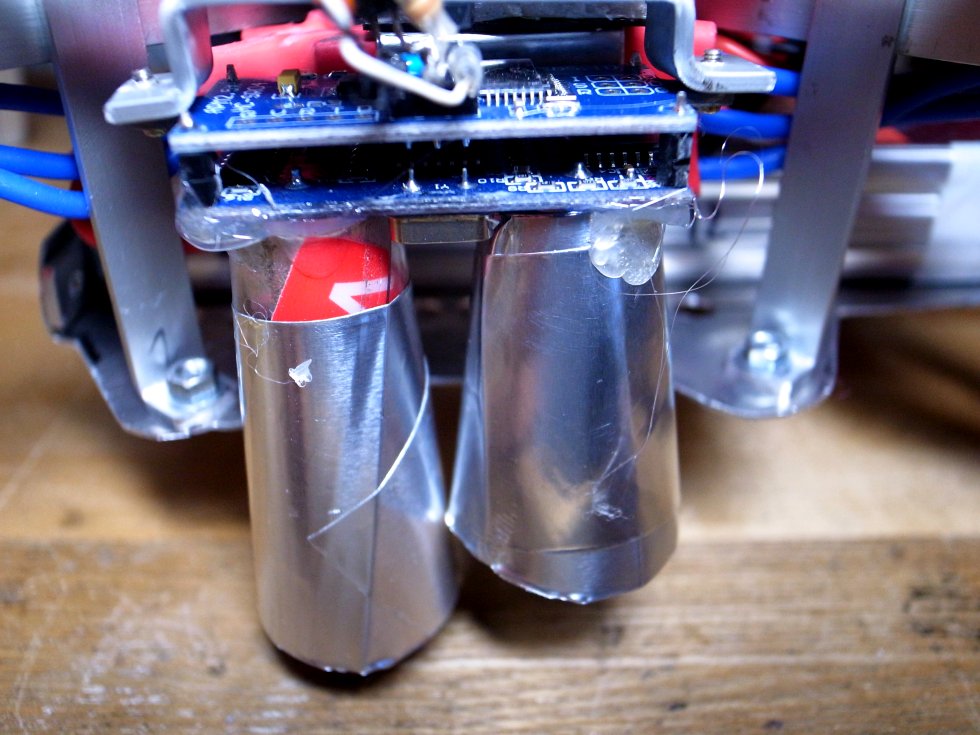
 この配線を間違うと、飛び上がりません。
この配線を間違うと、飛び上がりません。



 APM2.8の場合のピンアサイン
APM2.8の場合のピンアサイン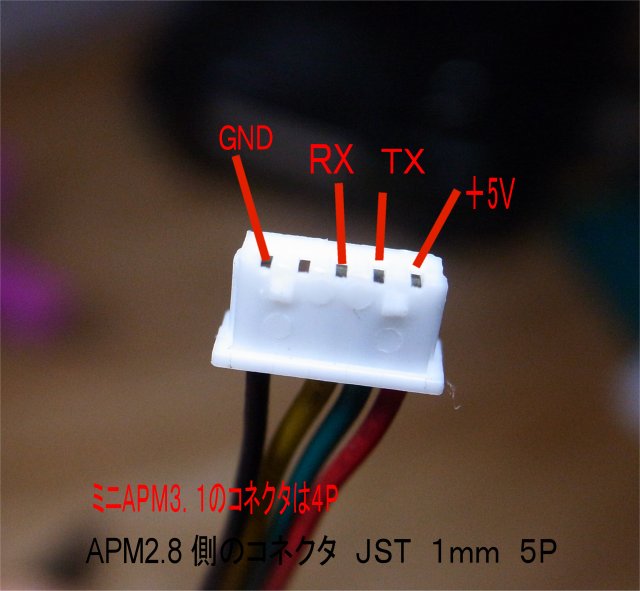







 57になっているところを115に変更
57になっているところを115に変更 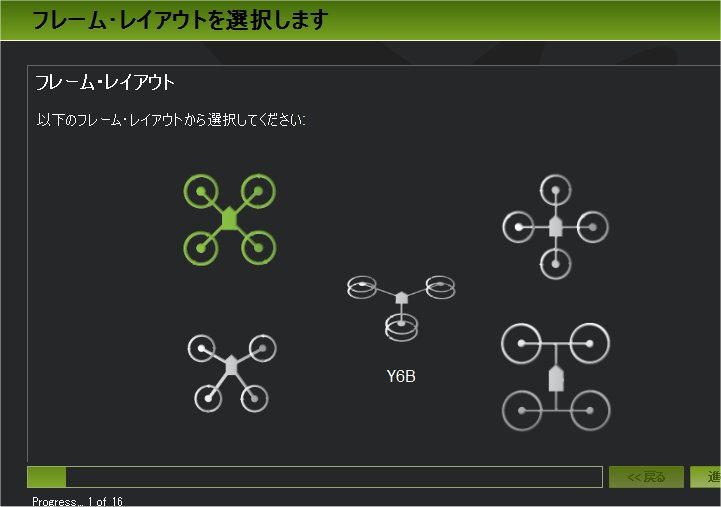


 ショートすると危険なので測定用にコネクタを作りました。
ショートすると危険なので測定用にコネクタを作りました。3モード切り替えを行う 3Pスイッチ利用(FMODEスイッチ)
機体の受信機の配線
FS-R9B CH6---->フライトコントローラAPM2.8の CH5 へ配線する


 APM2.8 の5P端子 3.1
APM2.8 の5P端子 3.1



久々に、飛ばしたら1分もしないうちに着陸。バッテリーの寿命なのかと諦めて別の物に替えても同じ
テレメーターを付けて機体の電圧計を比較したら、狂っているようだ。ミッションプランナーのバッテリーモニタ
で、3回ほど、3Cバッテリーの限界にしている10.8Vが正しくなのように調整した。楽に5分以上飛べるようになった。
狂った原因は不明です。
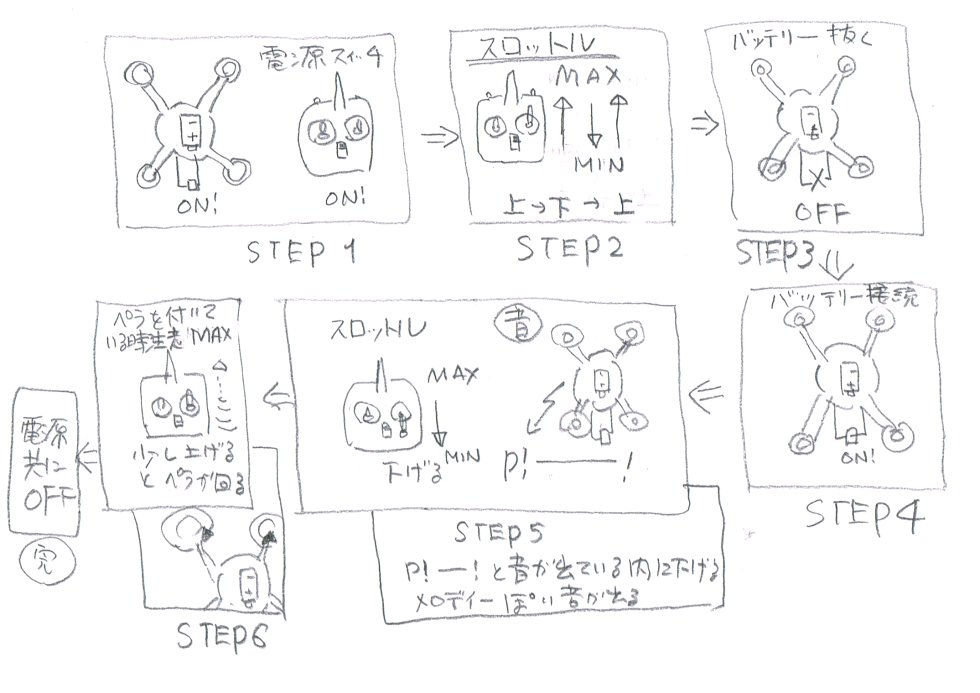
バッテリー接続と同時にピロピロ ピーーーーのような警報が出るのが正常みたいで
最後のピーーーが出ないときは、加速度センサーの不良で再校正が必要みたい。
ビィ ビィ ビィ ビィ と連続で鳴り続ける。
よくわからないが、FWを入れ直しして初期設定を完了しても鳴り止まず。ESCのキャリブレーションを行ったら止まった。
だが、この預かりものの機体は、安定してホバリングしているのに、突然、バランスを崩し暴走するので、1m以上高く上げられない。
調査中です。FCが壊れているか?ESCが熱暴走? モーターベアリングの不良なども考えられる。
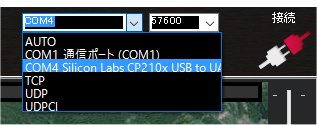
ミッションプランナー/USBで接続できない。
* Windows7を入れたPCに Mission plannerをインストして、APMと接続するも USBと接続できない。
コントロールパネル/デバイスMを見ると Arduino のドライバーに黄色いマークが。。。
ネットを検索したら有料のところにたどり着くが、ほかのPCはそんなことはしていない。
接続できるPCの中を検索したら、ありました。
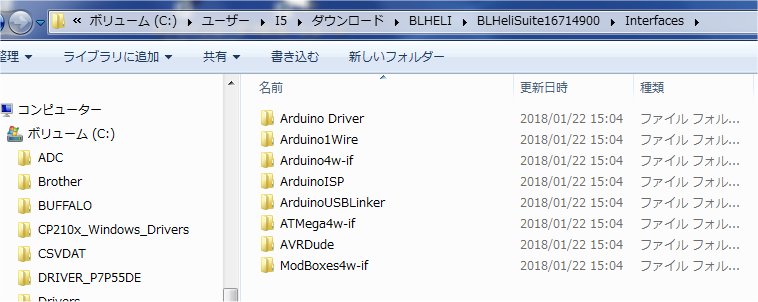
 ALiで8$弱でした。
ALiで8$弱でした。
これは、ESCと接続するUSB LINKERを買ったときに付いてきたものなのか。。。忘れてしまったけど
CDがついていたよーな気もする。探したけど行方不明。
この中のArduino driverをコピーして、デバイスマネージーからドライバーの更新を選び、このフォルダーを指定したら
うまく入った。今までは自動で入っていたのか?なんともよくわからない。
USB LINKERを検索すると、あるかもしれないね。調べてない。
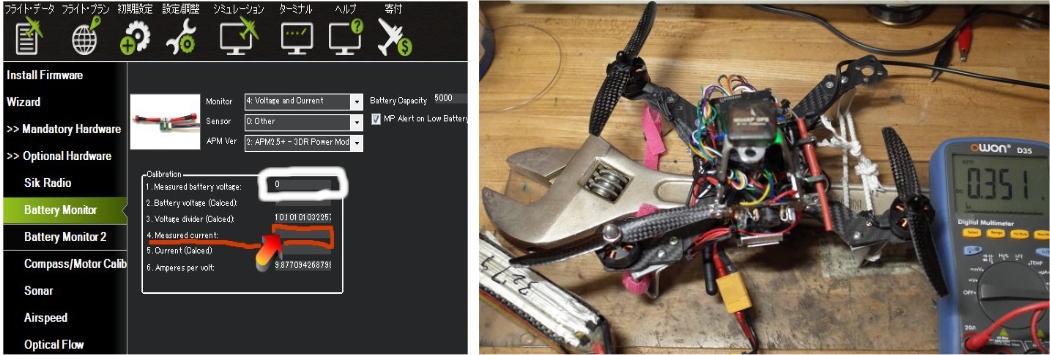
久々に、部屋でスタートさせたら、直ぐに電圧低下になり、ピーピーと警報を発生。
色々調べたら、どうも電源がの測定がうまくいっていない。電圧、電流値は校正しても、
一向に安定せず、いい加減な値を示す。
APM2.8が壊れたか、BECが壊れたか。。。とりあえずBECを新しいのに交換
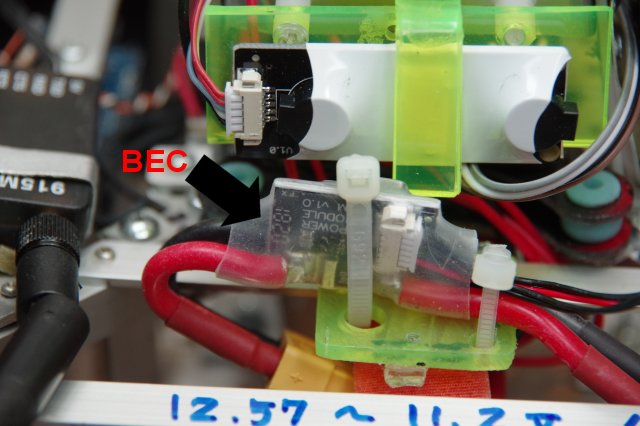
電流値が正しく校正できたようなのでOKでしょう。
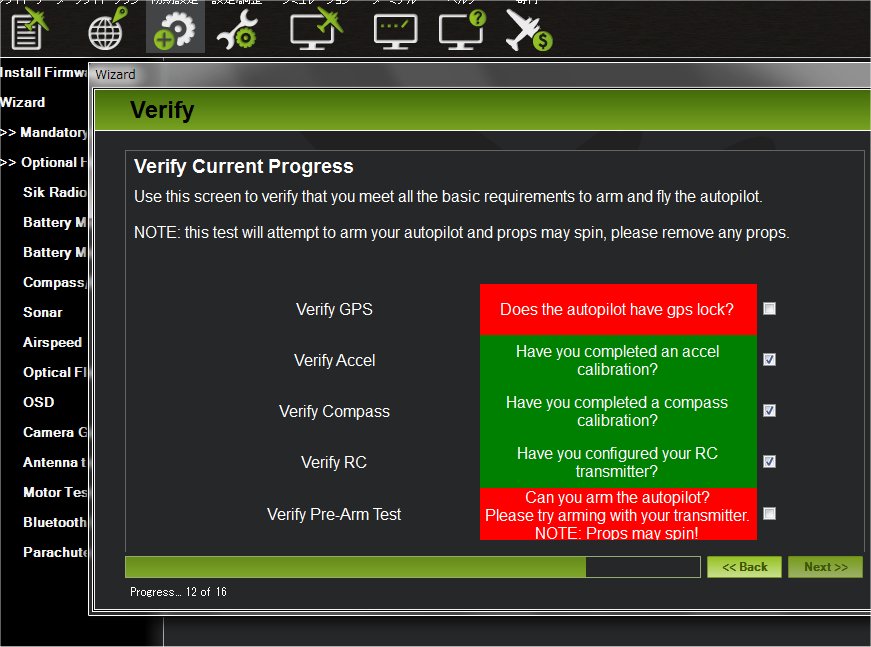
2022/04/21 浮上テストがうまくいきました! GPSモードもOKでした。
送信機と機体を、STBモードで接続しているのに NEED 3D FIX のエラーが出るときは
ジオフェンスを無効にてしみる。
LAND_REPOSITION=1にすると RTLでもスロットル以外は有効になる。
壊れたBN-880を取り付けるとSTBモードでもARMしないことが、実験でわかった。
High GPS HDOP = HDOPが3.0より大きい(GPS精度)
対応策:電源を入れ直す
Bad GPS Health = Sat Countが5以下(衛星の捕捉数が少ない)
対応策:Sat Countが7以上 電源を入れ直す 開けた場所に移動。
送信機のレバーにラジオキャリブレーションで、反応しないところがある。
APMの基板input 端子を調査したら、導通がよくないので再ハンダしたら復活した。
モーターが1台しか回らない
APMの基板output 端子を調査したら、導通がよくないので再ハンダしたら復活した。
(正常な端子の表と裏の導通抵抗が違った。)
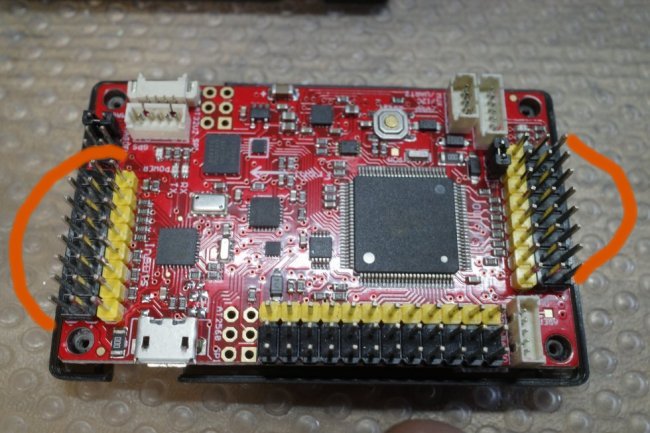
マークの部分の 黄色の端子の裏側を再ハンダした
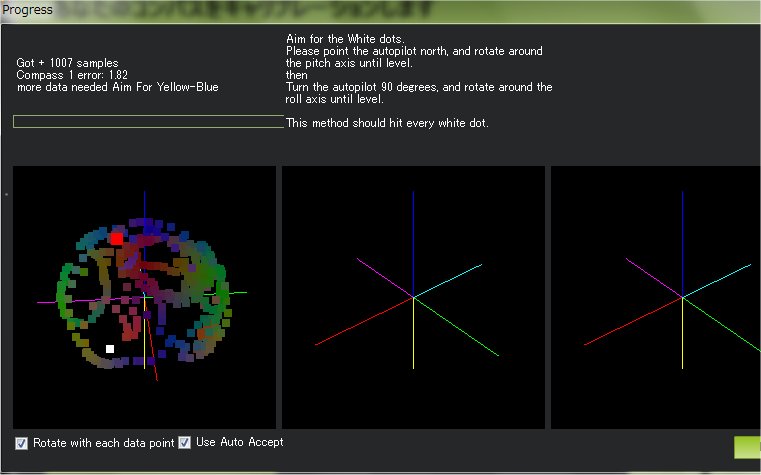
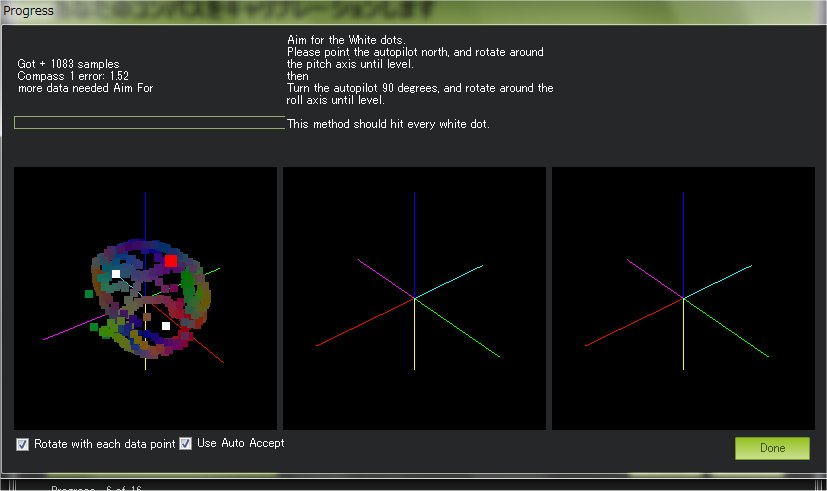
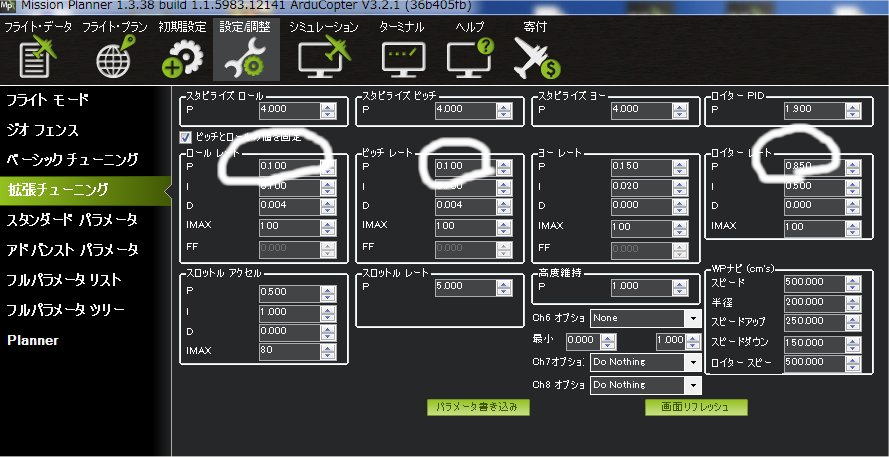
ジャイロの設定ポイント、白い点々 が出ない場合は
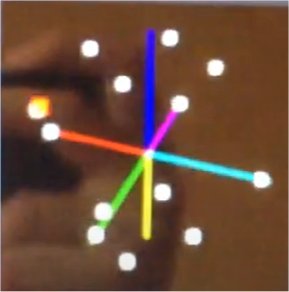
新規購入の場合は、APMにコンパスが内蔵されて無いかも。
GPSポートの横のジャンパーポートにショートピンをいれて、USB接続し直す。
見分け方は、私にはわかりません。値段の高いのは、付いている、もしくはコンパス内蔵と書いてある。
GPS BN-880 も同じで、コンパスの有無があります。外見では、判りません。
飛行が不安定な場合
高度低下
飛行モードに関係なく、問題なく飛んでいたAPM2.6のクアッドの機体。突然、3mくらい降下してしまう。
時には、着陸してDISARMのようになり、再度ARMも出来ない。
時にはスロットルに反応して上昇するも、しばらくすると降下する。
原因不明。APMへの振動を再点検。クションボードの前後に1センチくらいの幅で、取り付けていた
両面テープ(スポンジ付き)を全面に貼り付ける方法に変更するとともに、APM2.6の基板を点検
1ヶ所、さびか腐食のようになった部分を軟質ワイヤブラシで除去。
その後、配線などに余裕を持たせるように改造。
受信機Ch8とAPMのinput Ch8を接続していたのを外した。
テストしたら、一度も降下すること無く飛び続けた。
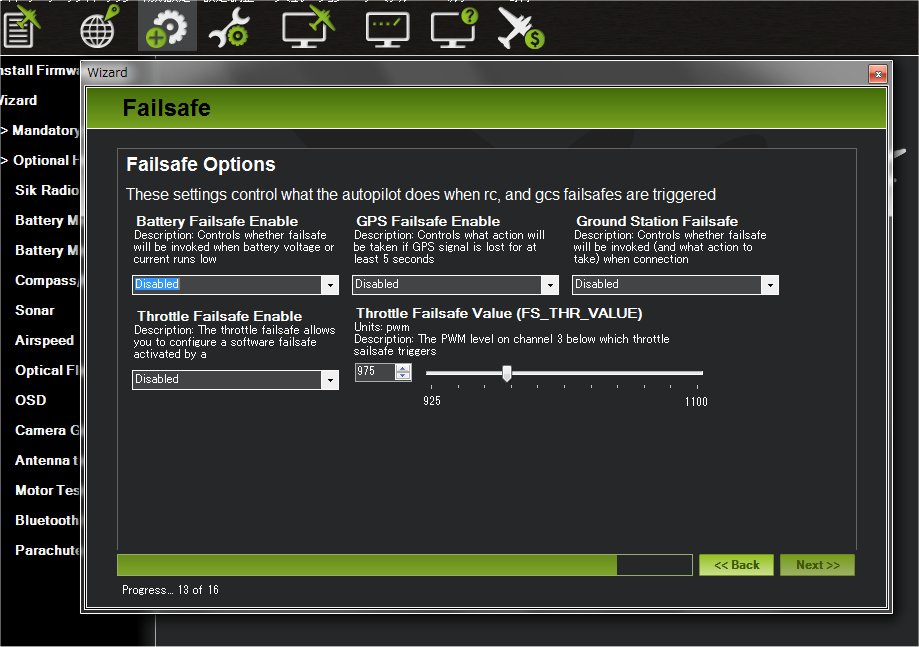
ラジオエラーが発生フェイルセーフで、LANDしてしまう。->FWを上書きでとりあえず解決
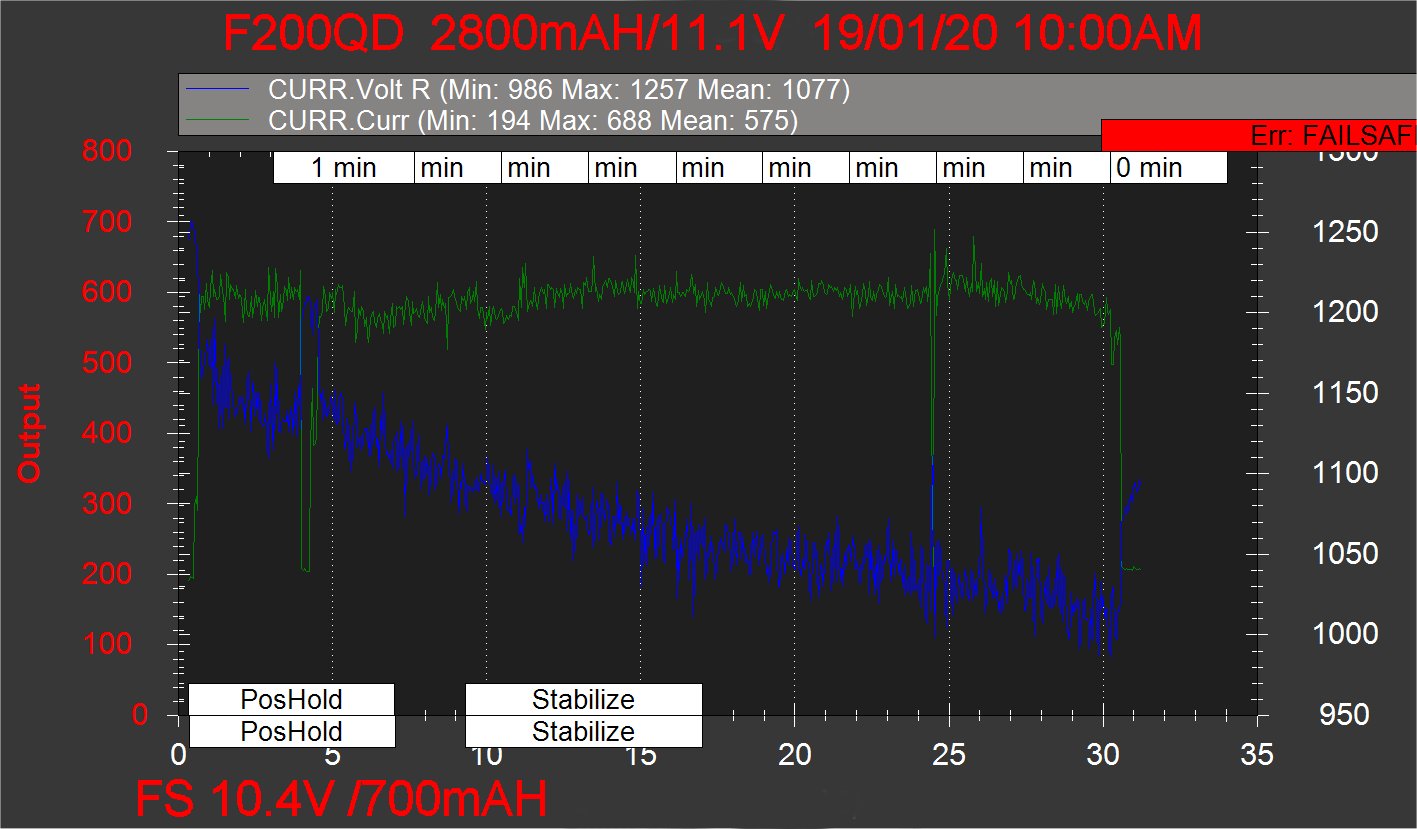
3000mAHのバッテリーは、新品に近いはず。9分間程度しか飛べない。FS=10.4でLANDの指示を解除してテスト
軽くて小さい2800mAHよりも飛べない。
ただし、この機体のBECの電流値測定のセンサーがどうもおかしい。設定しても正しく表示しないので、
当てになりません。
しかも、このところ、飛行直後、数十秒から数分で、ラジオエラーが発生してしまう。送信機は他のドローンと共通なので
受信器を交換するも効果なし。結局ファームを上書き後、異常なしで飛行した。無風で飛行時間10分20秒ほどでした。

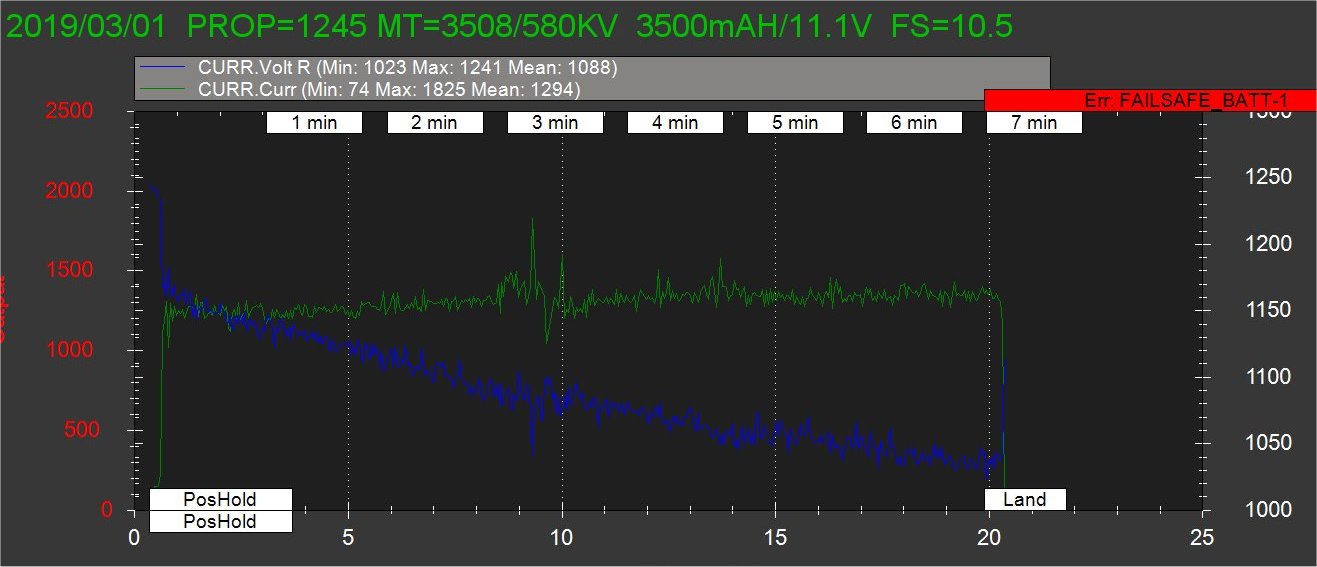
F500QD バッテリー電圧の異常発生
この寒い時期に7分飛んだので、途中で降ろしましたけど8分くらい飛びそうでした。 テレメータを外してFPVカメラ
バッテリーモニタが狂った原因は不明です。FS10.8を一度変更して11Vにしたような を取り付けてみた。
きはしますが、電圧調整はしていないはずです。

2021/02 HRB 11.1V 5000mAH の新品を購入 12.5V-11.2Vまで使って5分の飛行ができました。
送受信ユニットの交換
FLYSKTYからDEVOに変更 RX006受信機に変更しただけなのでMPのradio calivlation を行えば
OKだろうと、ところがARMして、スロットルをちょっと上げただけで、左後方にぶっ飛んできた。
初期設定からやり直しして、ESCの設定をやり直したら直りました。
預かり機体NO2
送信機を返却したのでRM003を取り付けてFS-iA6Bと通信していたが、
何度かテストしているとやはり、バランスが崩れ、操縦不能で墜落。
原因不明だかFCのテレメーターが使えない。再度FW入れ直し。起動時ビィービィーの連続音
これはESCの更正を行ったら停止した。
その後ARMしなくなり、MPのモードを調べたら、変更出来ない。radioを見ると、勝手に
バーグラフが動いていて、送信機にわずかに反応はあるものの、キチント反応しない。
受信機とFCがどうも信用できない状態。
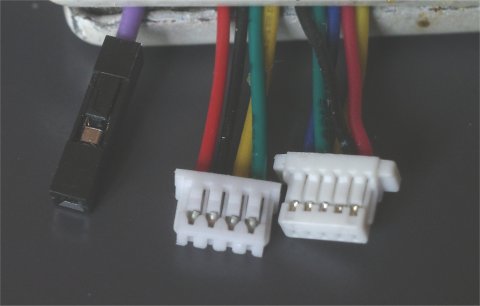
 この手の小型のコネクタは手で押して差し込んだだけでは
この手の小型のコネクタは手で押して差し込んだだけではMPで飛行ログをよみだそうとすると、ERR.LOGLIST と表示される。いままで1回も読めていない、
それ以外は問題なしこの原因も不明
受信機のLEDは、電源が入っていても点灯しないタイプで、送信機とバインドすると、赤LEDが点灯する
(FLYSKY FS-R9B)
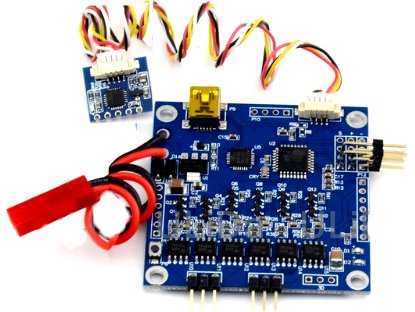
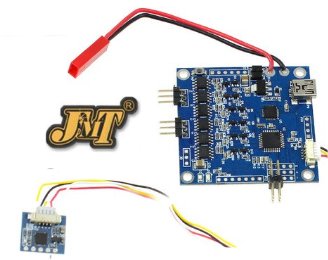
ブラシレスジンバルが、若干傾いているので調整したらますます悪くなり、振動まで始まり直らない
2軸のbasecam基板なので、simple BGC GUI の8ビット ドライバーソフトを
https://www.basecamelectronics.com/downloads/8bit/ ここのページから下の GUIをダウンロードして解凍
 はじめから調子悪かった。
はじめから調子悪かった。  これは無調整でOk
これは無調整でOk
調整用ソフトを使ってみたが、書き込みができないエラーが発生で、基板が壊れたみたい。
Firmware: SimpleBGC_2_2b2.enc.hex (85Kb 13.08.2013)
GUI: SimpleBGC_GUI_2_2b2.zip (5Mb 13.08.2013)
User manual: SimpleBGC_manual_2_2_eng.pdf (360Kb 13.08.2013)
突然、高度2mでホバリング中バーンと言う大きな音とともにペラが飛び散った。
原因は不明、HEXは水平に落下、厳しい着陸となった。よく見ると、フロント右のペラと、中央左の各片側が根元から
無くなっていて、近くに落ちていた。前回、着陸時にひっくり返ったのが原因で傷でもついていたのかも。フロントの2枚
が飛び散っていたら斜めに落ちて被害甚大でしたね。HEXでちょうどなんとかなるペラと高度でした。
どうも、ブラシレスシャフトタイプのアダプターが緩くなり良くない。逆ネジタイプの方が良いな。
上から押さえ込むワッシャーと言うかカーラーのようなものをヤスリで短くして締まるようにして使っている。
そのうちF5545は軽量化も考えて作り直したい。そのときモーターも変更だね。4Sにするかな。
久々に取り出したAPM2.6搭載のQUADが何故かハンチングがひどい。プロペラを外しても振動がひどい。
結局、FWを何回か入れ直して、直った。PIDも0.98に設定してもOKになりました。原因は不明、電圧、電流の校正
530gの機体 5030のプロペラ FPVカメラ 超音波センサー搭載バッテリーは180g 11.1V 2700mAH
劣化して若干膨らんだ電池でどの程度飛行できるかと、充電後X500QDに取り付けて、ARMしたらバチンと音がして
発煙した。分解して調べたら左後方のESCが壊れていた。原因はESC単体の不具合のようだ。
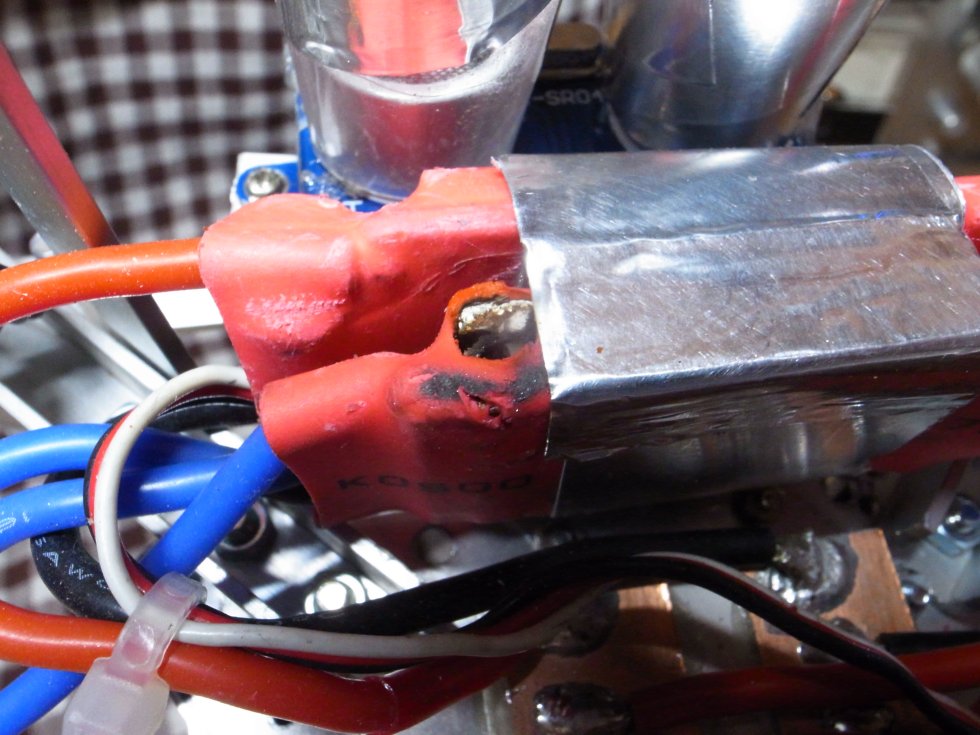
接続しているモーターをオフラインで調べたら、問題なく回るのでまずは安心。4in1の4S対応に交換しする予定だったので
都合は良かったが、飛行中で無くて幸いでした。30A/3S用のESCです。
11-1 LIPO電池の使用限界電圧
ドリルドライバーの使用限界は3.4Vにしているようなので11.1V(3s)の場合は
10.2Vでも良いかもしれないが、
ギリギリで止めているとしたら3.5Vくらいがベストとしたら10.5Vかも。
4.20 V----100%
3.95 V----75%
3.85 V----50%
3.73 V----25%
3.50 V----5%
2.75 V----0%
決してに以下の電圧を 3.7 V 以下にはしない方が良いと書かれてはいるようだが
HRBのバッテリーの取説には3.7V以下で使うなと書かれている。
3.7V限界 3.6V限界
3.7*3=11.1V 10.8V
3.7*4=14.8V 14.4V
いわゆる定格の電圧までにしろと言うことらしいが。。。せめて3.6Vまでは使いたいけど。
たしかに、3.6Vまで使わないでやめているバッテリーは長持ちしている気がするが、困った物だ。
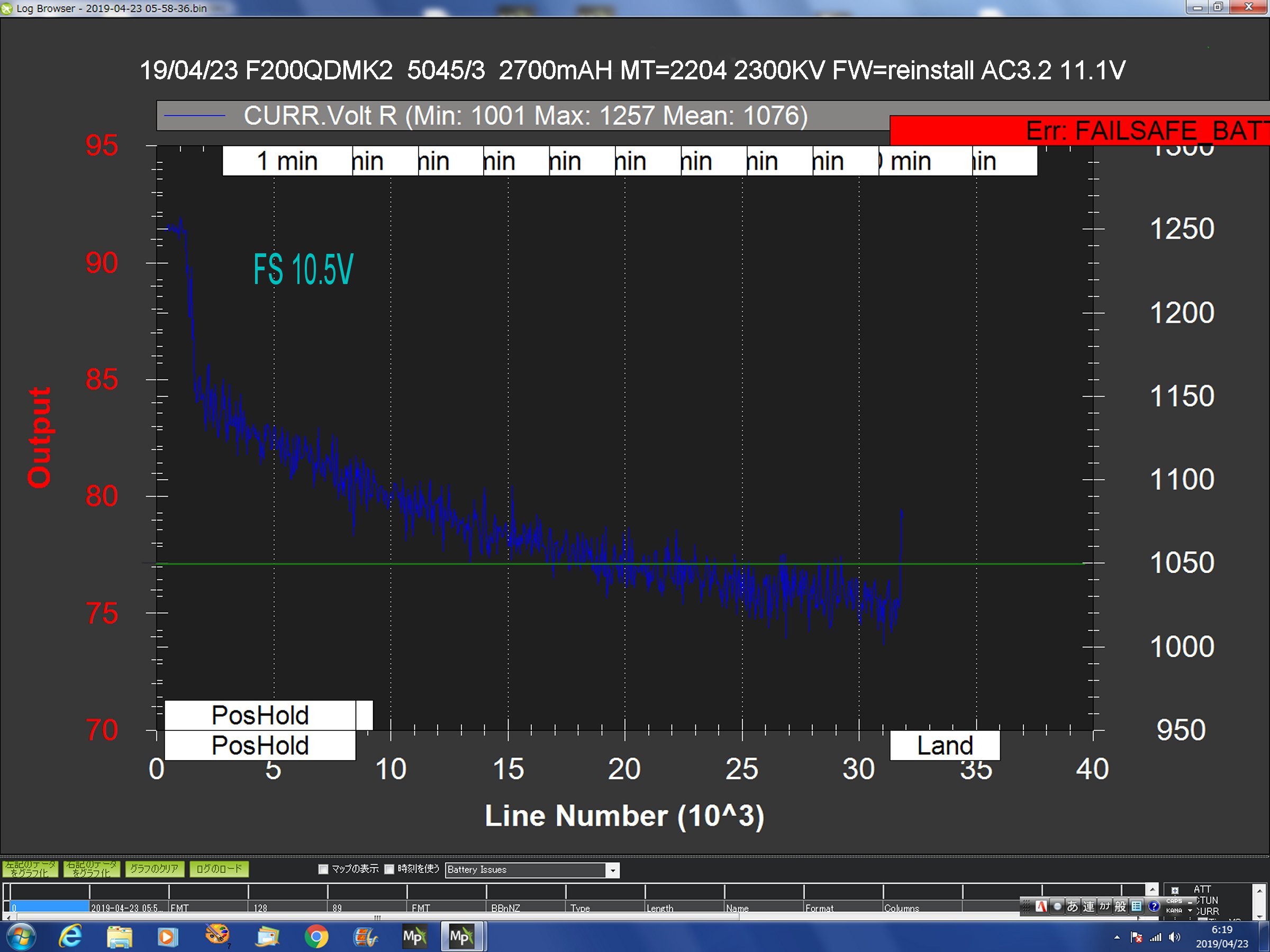
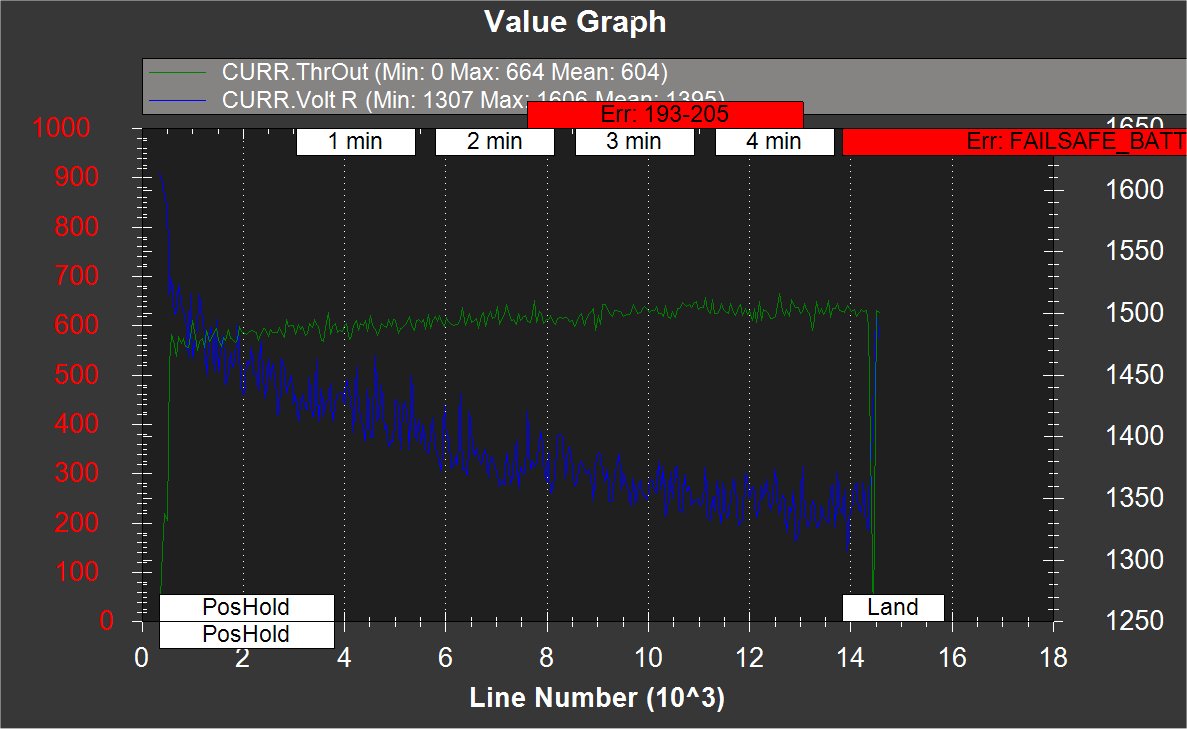
下のグラフはF250QDを10分以上飛ばしたときの電圧降下のグラフです
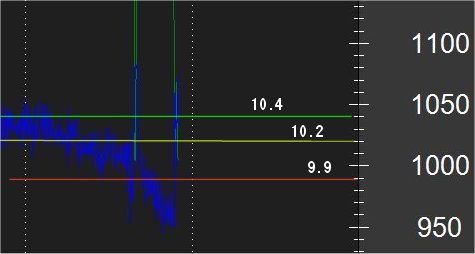
急激に降下が始まっているのが判ります。
フェールセーフの限界として3セルでは10.2Vで1セルあたり3.4Vではないか思います。
安全を見ると10.4V位がベストかもしれませんが、遠くまで飛ばしてフェールセーフが
働いたら、間に合いませんので注意ですね。
ただし、バッテリーの固体差があるし、BECの測定値と設定値がの問題もありますので
、つまり、測定された値が9.9Vとなっても、実際は10.4Vなのかもしれないと言うことで
実際に限界を調べた方が良いと思います。
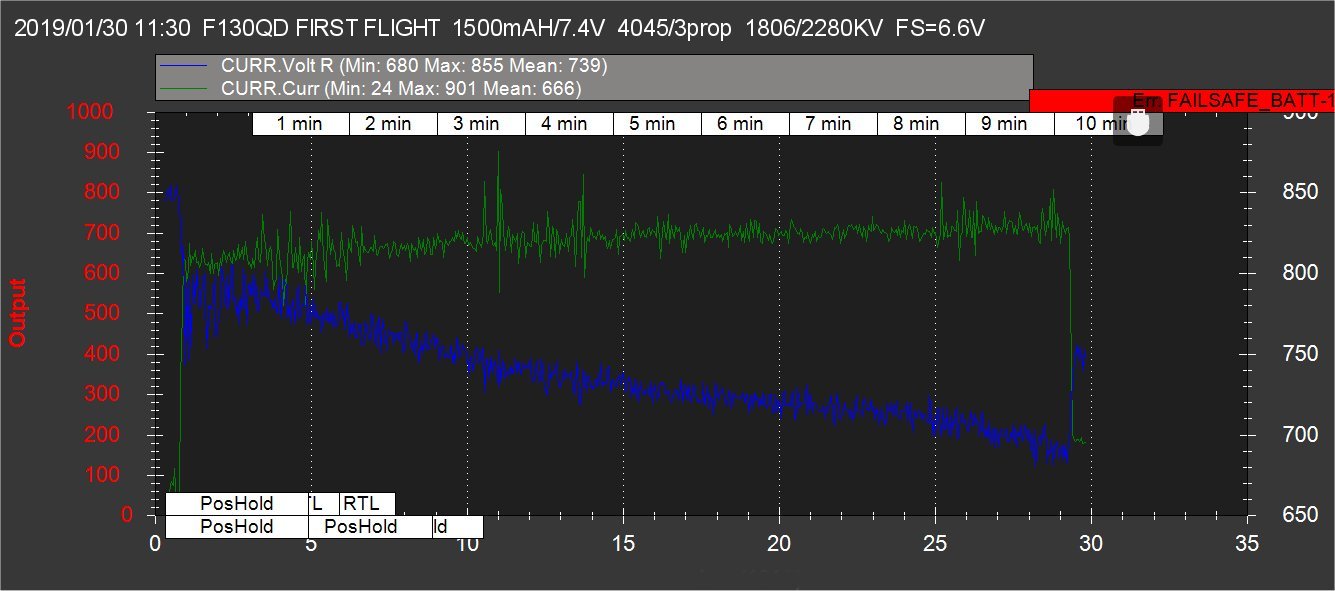
下はF130QDと言う軽量の機体をFS6.6Vにして測定した結果です。
2セルなので3.3Vなのですが、まだ電圧降下がはじまってません。
電池があたらしいとか、負荷が小さいとか、測定値が真値とずれているのかもしれません。
わずかに、右肩さがりではありますが。。。
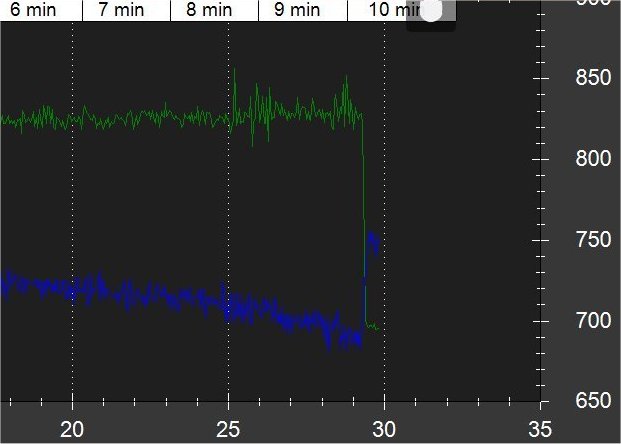
とりあえず、私としては1セルあたり3.4Vにして+0.2Vくらいあげておくことにしてます。
明らかに劣化している電池は、この範囲ではありませんけどね。
バッテリーについての勝手な評価

昔は値段でZOP とFLOUREON 60Cの表示に惹かれてYou&me(左上端)を購入
VHDはパッケージが高級そうで、HRBは良さそうな雰囲気で、赤いKypomは
当てにしないで買ってみた。
ZOPとFLOUREONとYou&meはどれも似たもので、置いてあるだけで劣化する感じ
下列の白いZOPは比較的ながもちしているかも。
VOKと言うのも買ったけど、寿命は短かったし、BLACKMagicだかは3回くらいで
使えなくなったのもありました。
数年前の製品なので、今は良くなっているのかも。
HRBとKYPOMはアマゾンから購入したのだが(輸入は遅いので)
でどころは、いずれにしても中国だとは思うが。。。
今のところ、私の評価ではHRBとKYPOMは良いような気がする。
使い方としては、3分以内の飛行が90%です写真撮影のみなので
長時間の飛行はテストの時だけです。
---------------------------
3300mAH/11.1V 劣化電池
---------------------------
これを、X500QDに付けて飛ばしてみた。
充電電圧は4.05Vまでしか上がらず、充電完了となってしまう。
5500mAH 新品に近いものだと、寒いときでも9分+/-30秒
3500mAHでも7分近く飛べた。これだけ劣化していると5分以内かと思いきや
6分弱も飛行できたので、まだ捨てるには惜しいと言う結論でした。基本膨らんでいるのは
使わない方が良いということらしいですよ。ちなみにFS電圧は10.5Vに設定
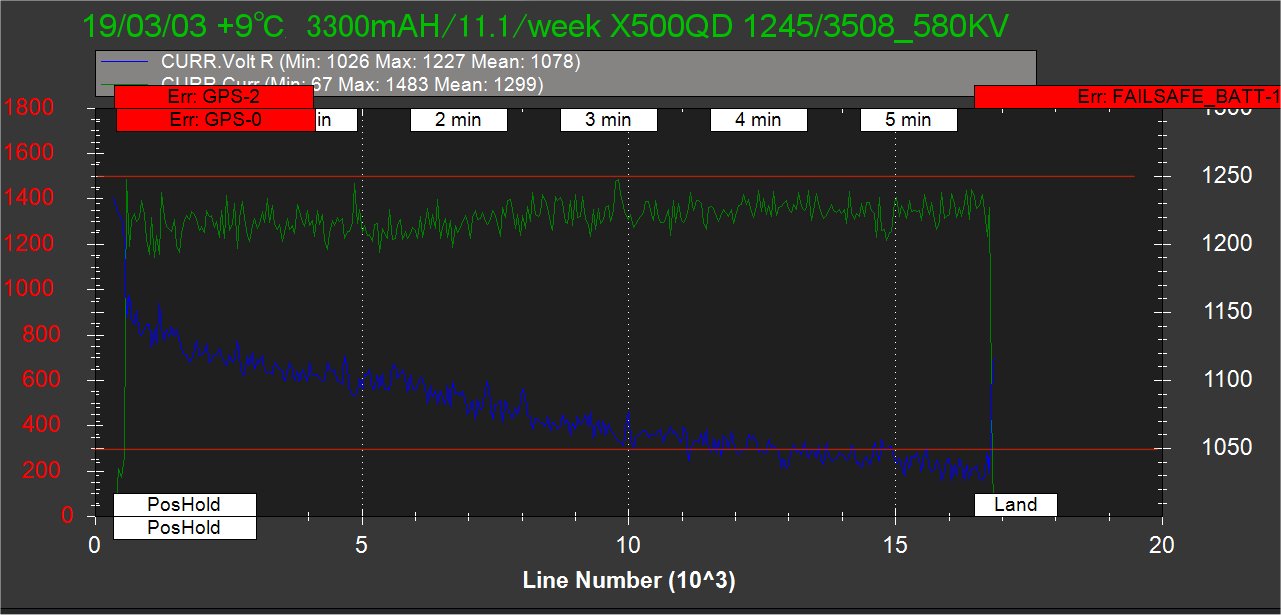
気温が9度と暖かかった事もあると思います。
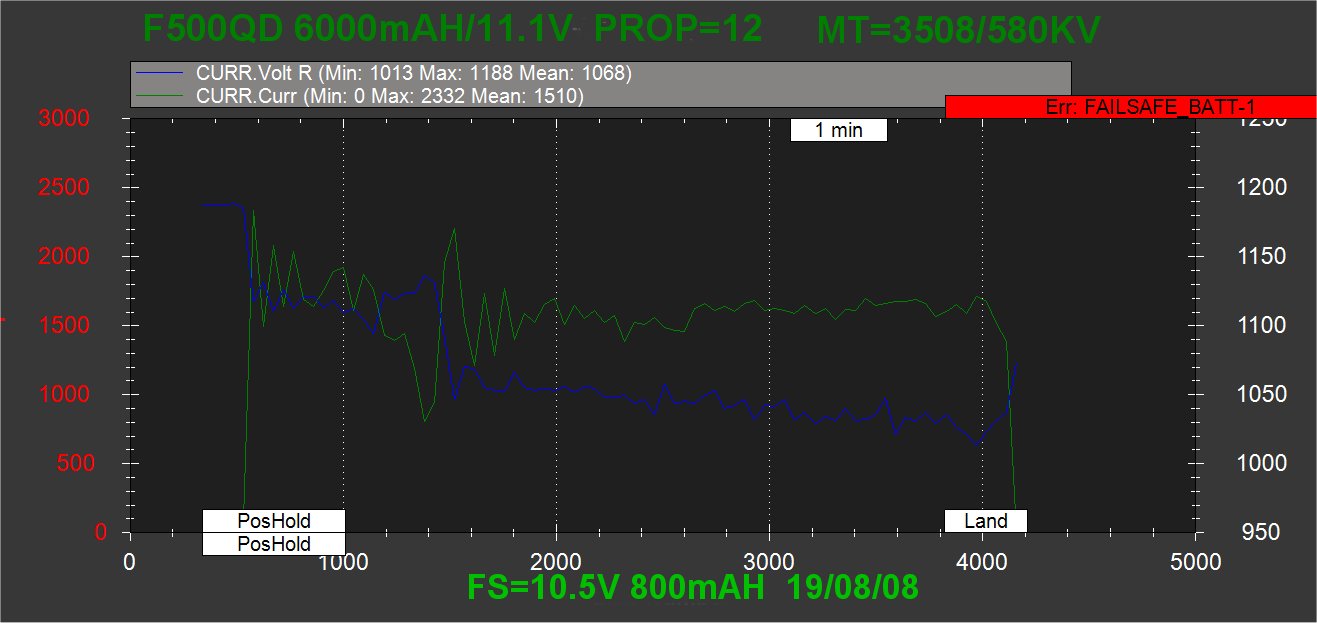
--------------------------------------------------------------------
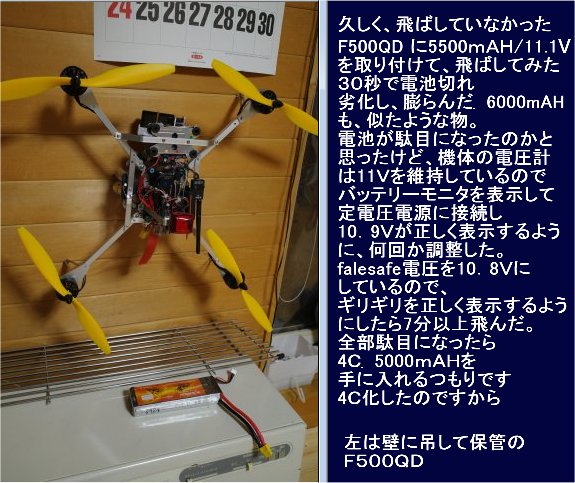
F500QD 19/08/08 6000mAH/11.1V 劣化電池/
すでに、膨らんできていてFS=10.5Vでも1分ちょっとしか持たない。
--------------------------------------------------------------------
戻る
12 モーターとプロペラの関係
12-1 ハンチング
920KV-1000KV 2212
1045/2BLD=OK
8045/2BLD=OK
8045/3BLD=OK
7045/2BLD=NO 推力不足
2300KV 2204の場合
5045/2BLD=NO NO(ハンチング)
5045/2BLD=OK? カーボンペラなど細い場合 極弱いハンチングが出る時がある
5045/3BLD=OK? 弱いハンチングが出る時がある
4345/2BLD=NO(ハンチング)
4045/2BLD=OK
4045/3BLD=OK
3045/3BLD=NO 推力不足
3030/4BLD=NO 推力不足
大きいプロペラを使うとハンチングしやすい。重量が軽いとハンチングしやすい。
KV値が大きいとハンチングしやすい。
消費電力では、3葉を使うより2葉の大きめの方が有利だが、
また。羽根の面積が大きいと発生しやすいし5030より5045の方が発生する
もちろん、機体の重量も影響しますし バッテリーを11.1Vから14.8Vにすると発生します
F500QUAD で8045/3プロペラと1245/2プロペラの比較を行った。
ただ、8045/3の時はバッテリーが小さく60gほど軽い。
極端な違いは無いが、60き軽いが、消費電流が1Aほど多いように感じる
プロペラ 8045/3
プロペラ 1245/2
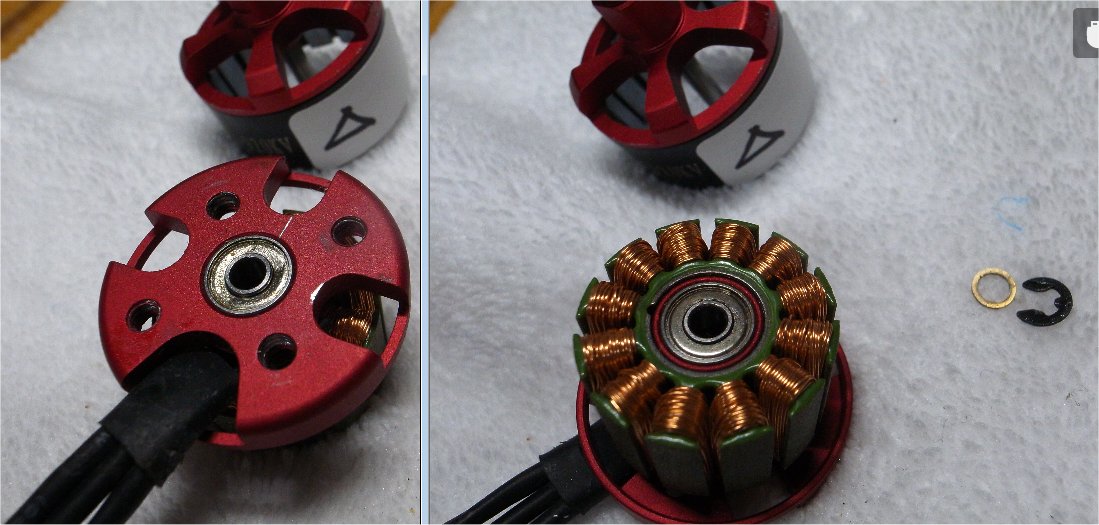
12-2 モーターのベアリングの取り外し
最近、ベアリングのCMが目に付く。師匠に外し方を教わった。CリングとかUリングという留め具を引き抜く。
これが、たいへんで、どこかへ飛んでいくので、最低でもテーブルに布を敷く。
ローターとステーターを分離する(磁力があるので力が必要)
ベアリングの内径(私が分解したのは3mmほど)にぴったりのシャフトを見つける。PC用のDVDドライブに使われているシャフトが
ぴったりでした。この先端を凸状に削り内部から底に向かって差し込み、気持ち斜めにしてハンマーでたたくと抜けました。
反対側も同じように、底から内部へ入れてたたきます。
半分壊れたものでテスト的にはずしてみた。


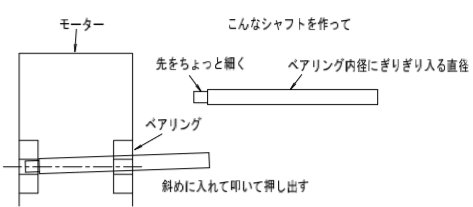
8*3*4 外 内 厚 師匠の説明図を拝借
戻る
13 PWM発生装置
作らなくても中国製で¥1000円もしないで売っていると思います。
ESCのテストとかモーターが壊れていないかの確認に必要です。
自作の場合の回路図です。参考に
アンプ用ICがあれば作れます
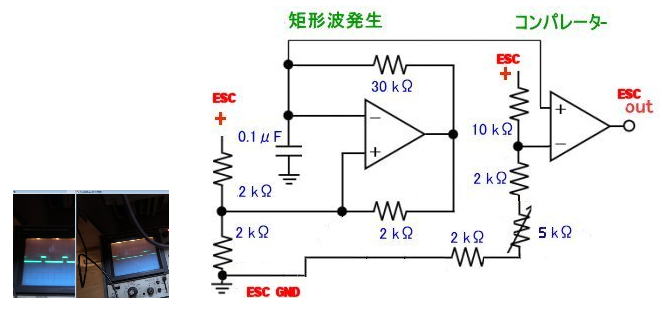
TL555を使った発生装置が掲載されてました。
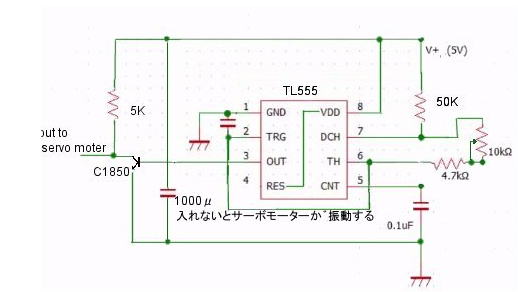
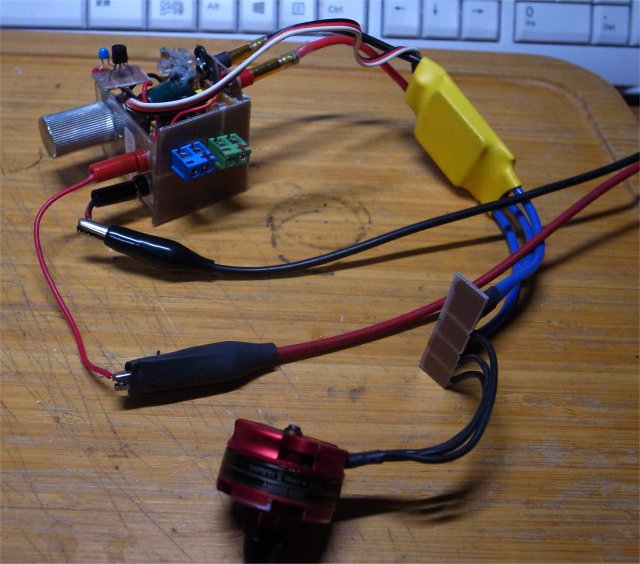
定電圧電源から12Vを接続してテスト中 自作のPWM発生器には5VのIC 100mAを組み込んでます。


これでも使えそうですね。 これが良く使われているようです 4$ほど
DC5Vをinput側にoutにESCの信号線をつなぐ
もちろんESCは別に必要です。
戻る
14. DEVO7E
APMと受信機の接続方法
紛失して現在はRX601を使用中
DEVO7E(RX701)(RX601)<---->APM input
ELE-->APM CH2
ALE-->APM CH1
THR-->APM CH3
RUD-->APM CH4
GEAR->APM CH5
AUX2->APM CH6 MPのラジオのディスプレー画面で送信機のスティックを操作して、正しく動くように、送信機の
REVERSEの設定を行うこと。
CH1とCH2だけが逆です
前進と後進はLCDのグラフが逆になります。(スロットルを前に倒すとLCDグラフは下に伸びる。)
送信機のREVERSEの設定
Elevator= Reverse
Aileron= Reverse
Throttle= Normal
Rudder= Reverse
Gear= Normal
Pitch= Normal
Aux= Normal
DEVO7E の設定方法
1.フライトモードを切り替える方法
Main Menu → Model Menu → Device select → Flight Switch FMOD SW にする
Main Menu → Model Menu → Device output → AUX2 FMOD SW にする
FUNCTION Active
FMOD を ON(下 1側) にするとRTL に変更することが出来る
ただし、事前にミッションプランナーソフトウェアーでフライトモードを指定しておく事が必要
この場合2つしか選べないので、一番上と、一番下に好きなモードを書き込んでおく。
私は、POSHLDとRTLにしている。せめて3つあれば、STB POSHLD RTL にしたい。
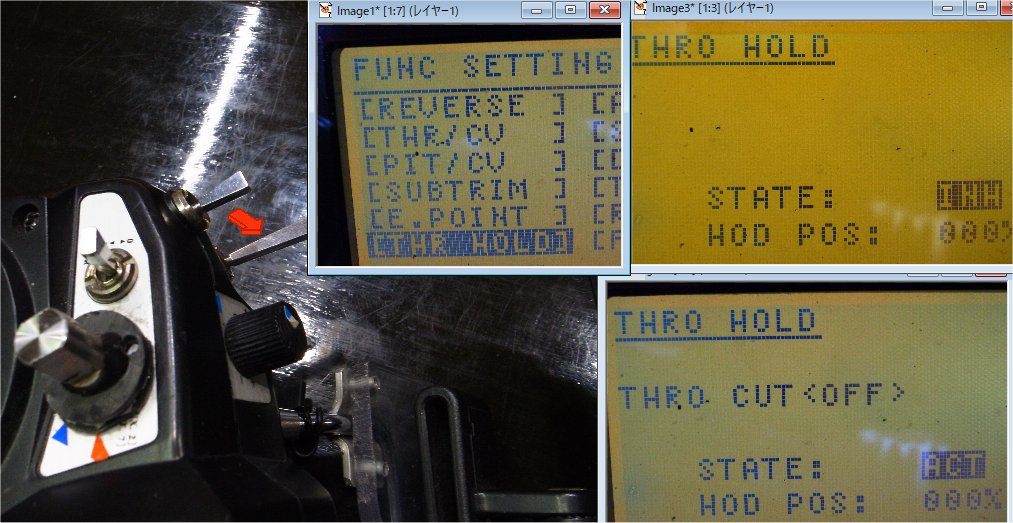
2.HOLDスイッチの設定でONにするとモータが停止する設定
Main Menu → Function Menu → Throttle Hold → Hold status Active にする
HOLD Position -5%
Main Menu → Model Menu → Device select → Hold Switch Hold SW にする
Main Menu → Model Menu → Device output → AUX2 Hold SW にする
FUNCTION Active
HOLD を ON(下 1側) にするとモーターが停止
RXとAPMの配線メモ

受信機側 APM2.6側と送信機のリバース設定 MinAP GPS配線サインが付いてきた。現在BM-880を使っている
RX APM2.6/Ch
e1ev 2 (S + -)の3本線 受信機の一番端のELE表示の所に+5VをAPMからいただいて、接続しています。
aile 1
thro 3
rudo 4
gear 5
aux2 6
モーター接続ポートにある+5Vは内部で切断になっています。使うときは接続する必要がありますが。
特別+5Vを入力する必要もないようです。通常は使いません。
RX601を購入。すごく小さいけど、説明書もない
バインド方法もわからないけど、電源入れればつながるのだろうと、試した。
コネクタは左から S + GND と普通です。
送信機の電源を入れて
CH1真ん中(+)と右(GND)に5Vを印可してCH3に小型サーボをつなぎ
スロットルを上げると動きました。アンテナ線が短くて、設置しやすい。
戻る
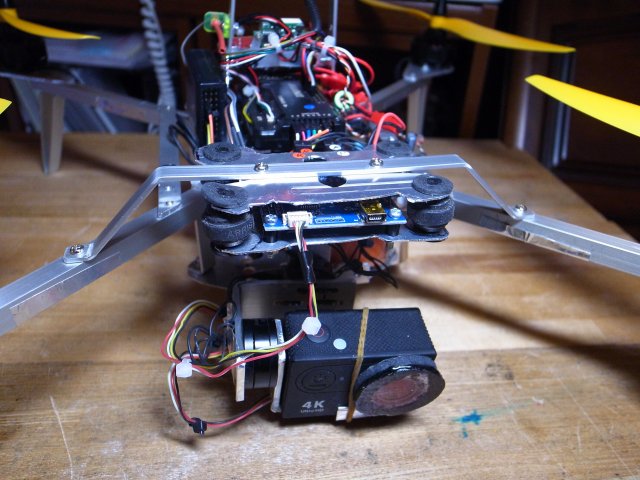
15 FPVカメラの更新したけど
2018/10/02 F250HEXのバッテリーを4s化したのでモーターとESCも4S化した。
続いてF5545HEXのモーターだけは4S化しておいた。
F250HEXの送信機DEVO7Eの通信が若干怪しくなってきたので、送受信機共にFLYSKYに統一した。
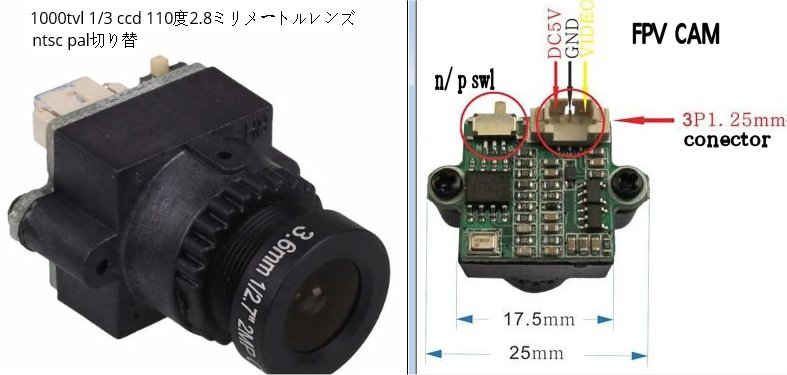
2018/10/06 やっとFPVカメラが届いたのでF250HEXに取り付けた。110度のカメラ(サーボモーターなし)

右はこの機体に取り付けたカメラ、コントラスト解像度ともに良くない。お勧めは左下のカメラ
狭い範囲を見れるのが欲しかったのだが失敗でした。 下が比較写真です

戻る
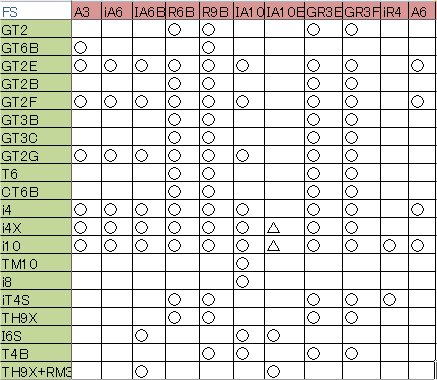
16.FLYSKYの送信機と受信機の関係
戻る
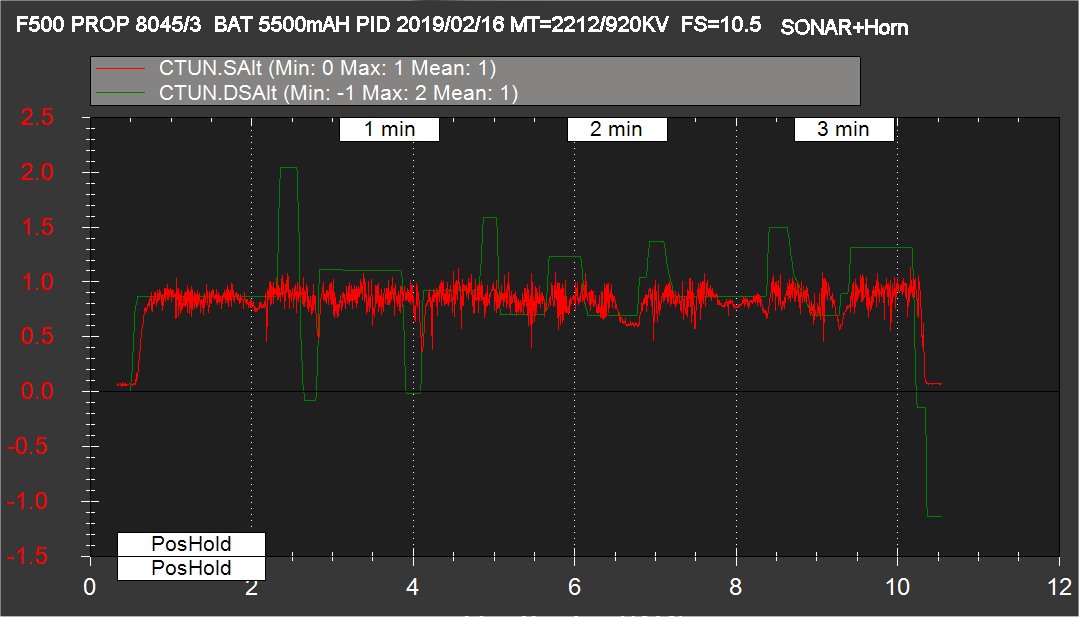
17.フライト電圧データとバッテリーに関してのログ
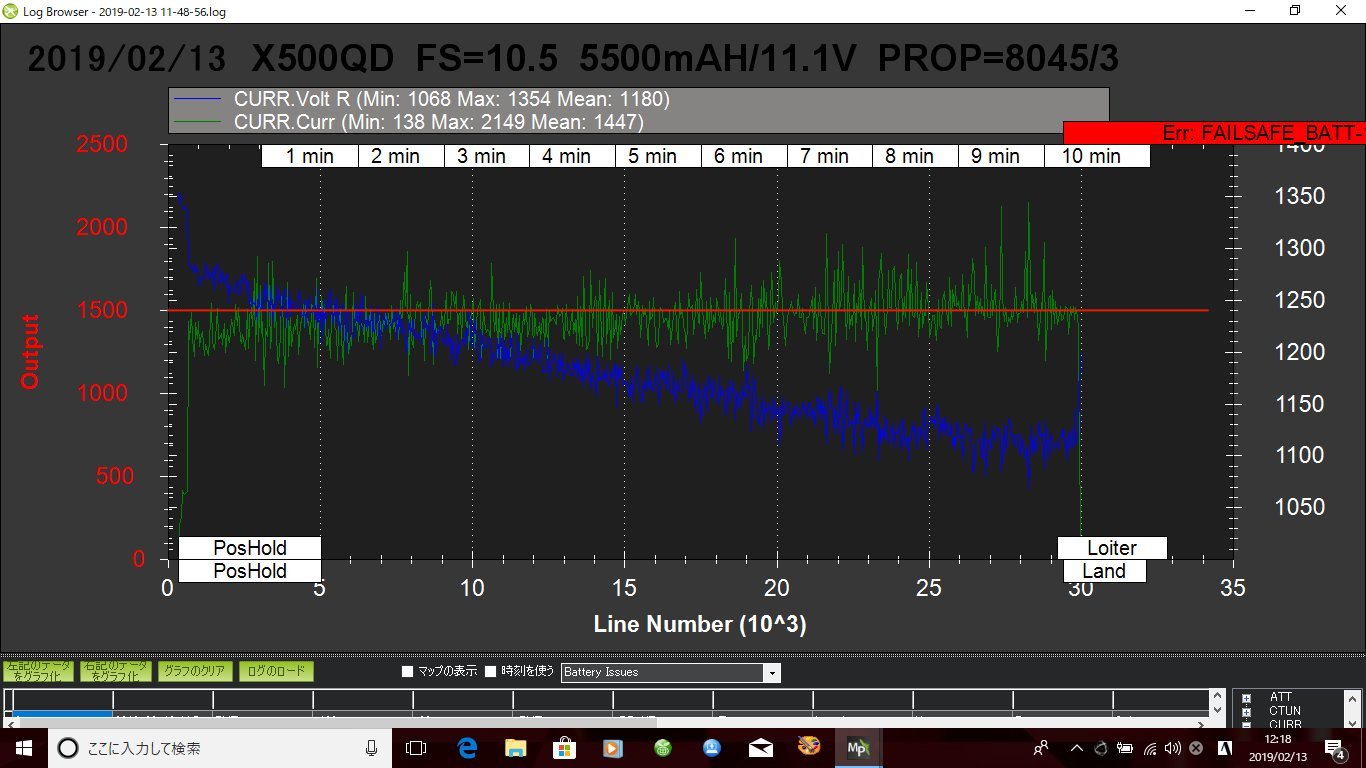
下記は、5500mAH/11.1Vのバッテリーを搭載して、ホバリングしたときのログの読み込みである。
FS電圧は9.6Vであるが、機体の電圧計が10.8Vを示したので、着陸した。その4分間のデータです。
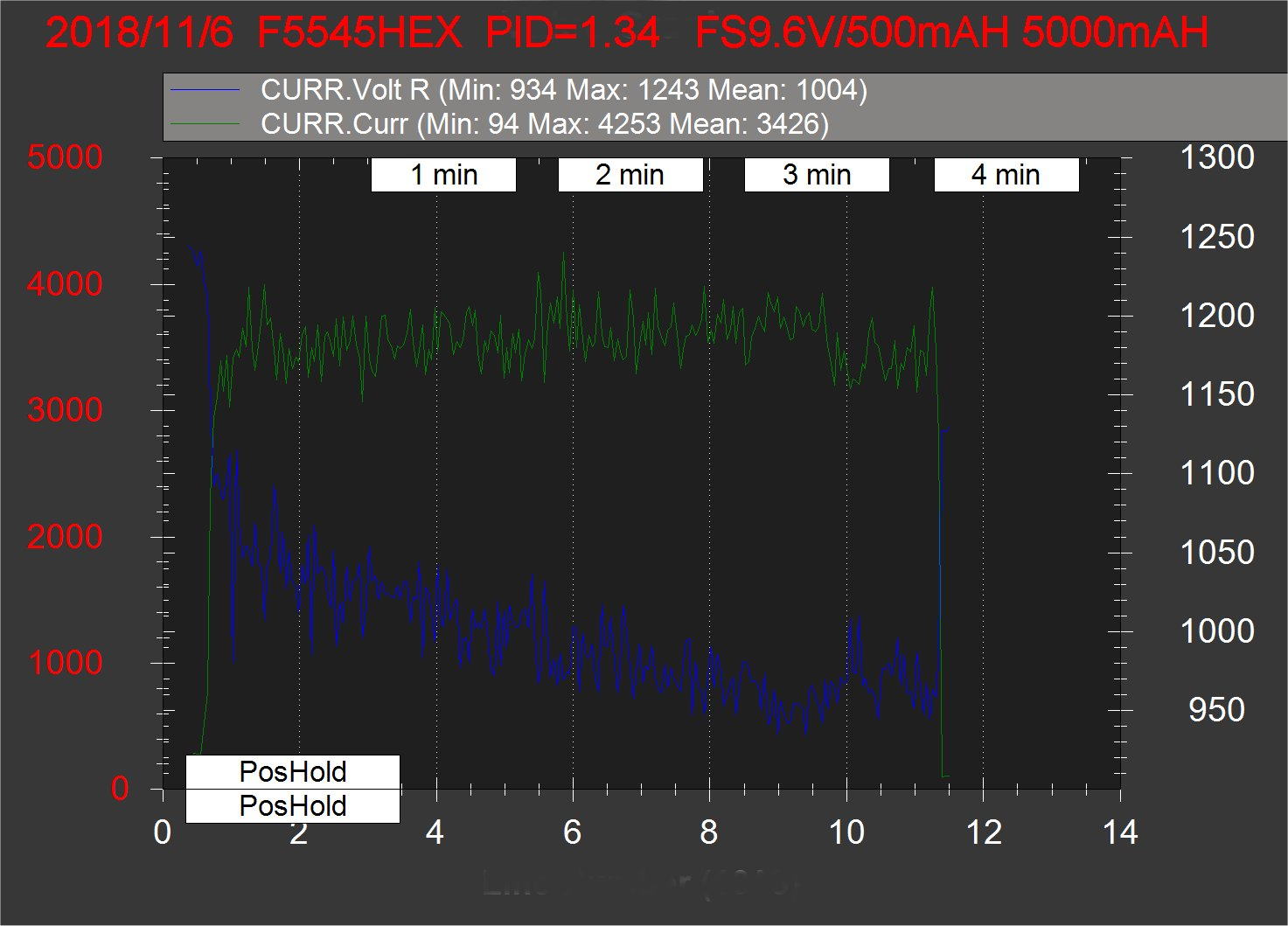
この状態で、充電器に接続したら各セルの電圧は3.87Vでした。3.76V前後を示したらほとんど空と
考えているので、FSをもう少し下げても良いかと考えている。
9.2Vくらいが限界かと考えている。
(この機体の電圧センサーの校正設定にもよるので、そのまま設定しないでくださいね。)
私は充電開始電圧が良い目安と考えています。
ただし、バッテリーの寿命との関係は不明だけど、3.0Vを切ると復活不能との記載もあるので、注意が必要。
小型のバッテリー2700mAH/11.1Vなどは10.2V 各セル3.4Vまでを限界にしている。
下は 2200mAH/14.4V FS=13.8V での F250HEXの電圧と電流のグラフ セル当たり3.45Vを限界にしている。

在庫パーツでの製作
余り物で組み立てF200QUAD
余り物の、パーツで1機作ろうかと安いフレームを買った。届いたのは5インチペラクラスのフレーム
3インチのモーターでは、大きすぎ、ほとんど推力がフレームに邪魔されそうだ
 こんなに違う
こんなに違う
このまま、5030で作っても、同じ物ばかりでつまらないしね。思案中
ESC4個とAPMはあるので、GPSと受信機があれば、なんとかなるが。。。

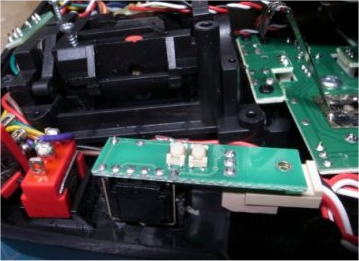
3C 2204 2300KV BN880/GPSの納品待ちです 受信機はRX601を内部へセット(左の真ん中の隙間に)
機体重量 350g バッテリー込みで550g 以下の予定 送信機はDEVO 7E
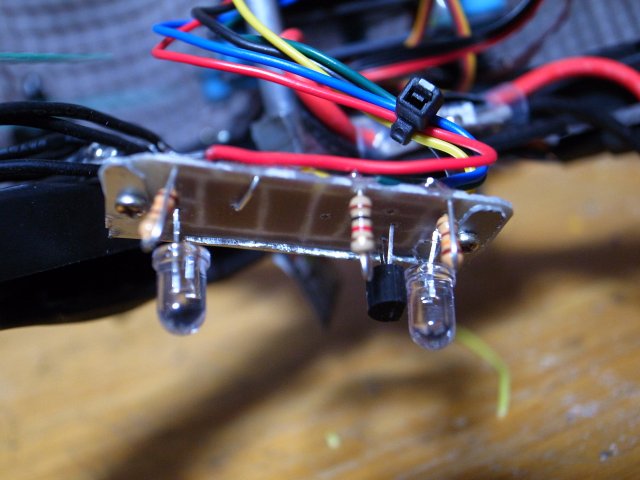
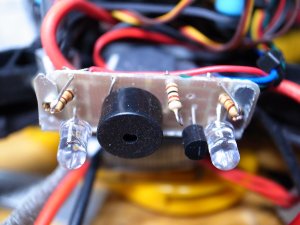
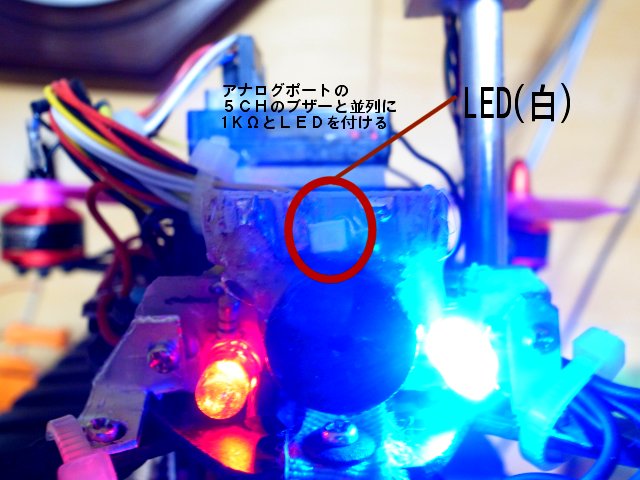
LED&Bzの製作 市販品を買えばいいけど、暇なので作ったでも、Bzが無いことに気がついた。 やっとブザーが届きました。
Bzだけは12Vの電源から直接Trを介して駆動、A5ピンはTrのBに接続の1KΩへ アルミでフレームを作り取り付け。
結局、中国からの不足パーツはGPSのみが届いただけ、以前製作してF200QUADはこれと言った特徴も無いので
分解してしまい、この新しいフレームに組み込んだ。受信機FS-R9Bは大きいのでケースから取り出し
機体の中央フロント側に取り付けた。

分解して、FC(APM2.6)と受信機(FS-R9B)を使う。


写真のプロペラを取り付けて、フルスロットルで高速回転させたら収まる。低速域のPWM信号がキチント出ていなかったみたい。
ハンチングの原因はESCでした。4個とも別のものに交換したら収まったようです。 上クリックで動画です
2204/2300KV PROP=5045/3機体重量440g 11.1V/3500mAH/総重量700g 11.1V/2700mAH/総重量620g
初飛行 FS10.4V/11.1V/2800mAHバッテリーでちょうど10分間飛んだ。
このバッテリーで他の機体だと5~6分間しか飛べないので驚きました。1m高さでカメラを取りに行っている間に着陸したりが2回ほどありました。
電流値の更正ははできていません。どうも、電流の更正が出来ないみたいFCがおかしいかBECが壊れているのか?
参考 下はF330MK2 5500mAH/11.1V FLOUREONでほぼ新品で計算値では10分くらい飛べそうだが、2セットとも同じ。
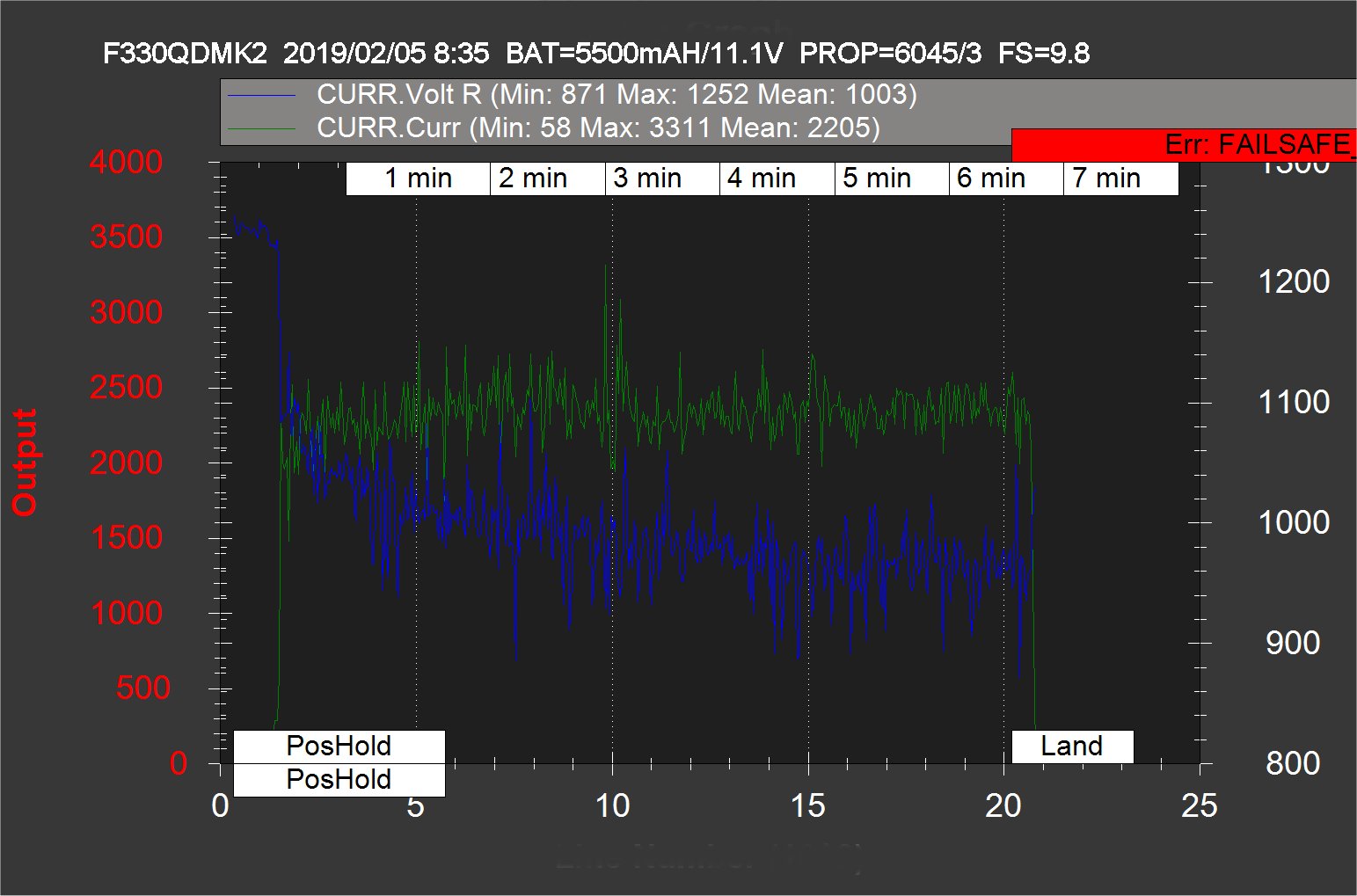
上が5500mAH FLOUREON 下が3500mAH ZOP なぜに3500の方が長く飛べるのか??
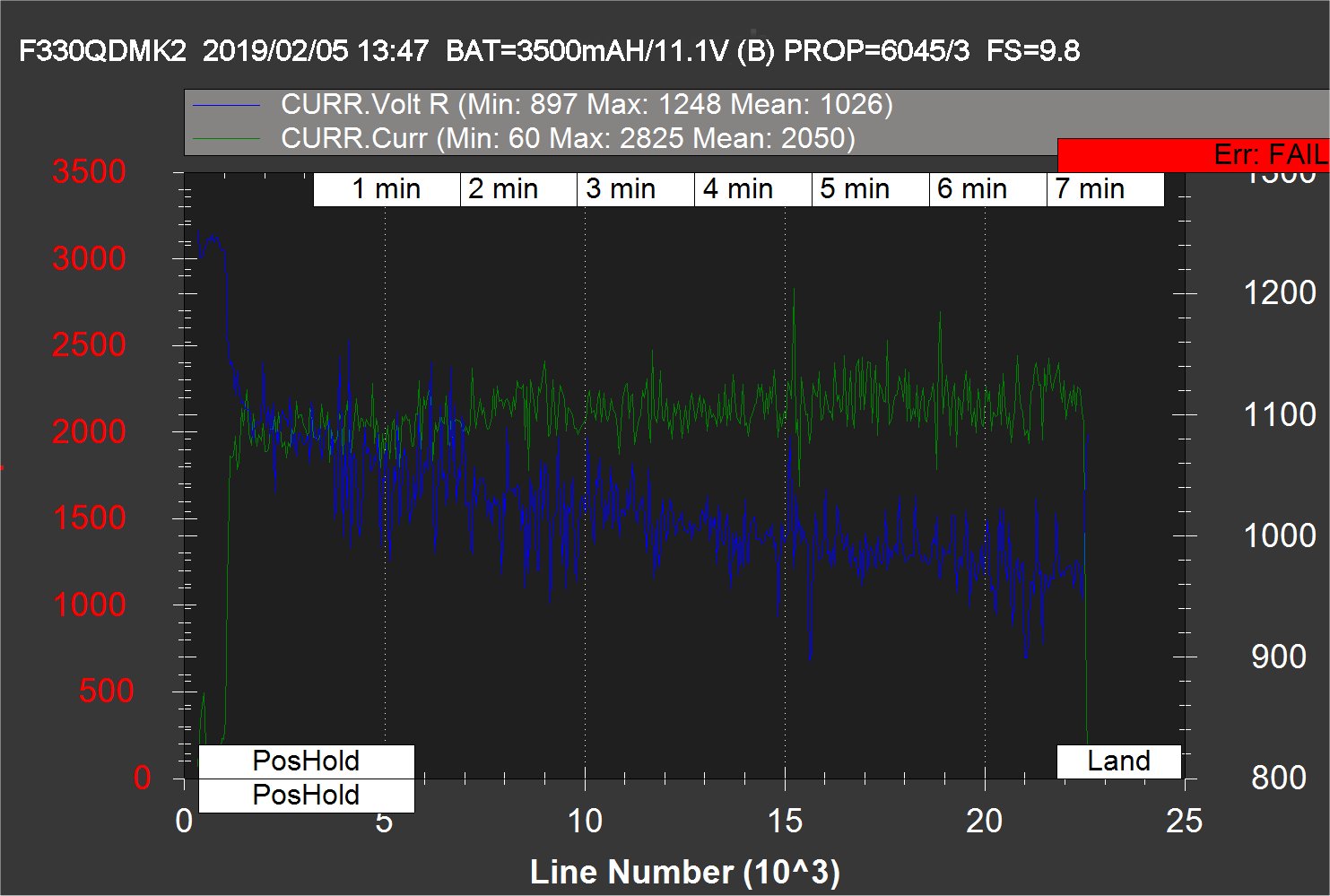
大橋の風8mと条件は悪い。ほとんど飛ばすのは間違っている状況。
電圧ががっくり、下がっていないので、もっとFS電圧を下げてもよいのかも。
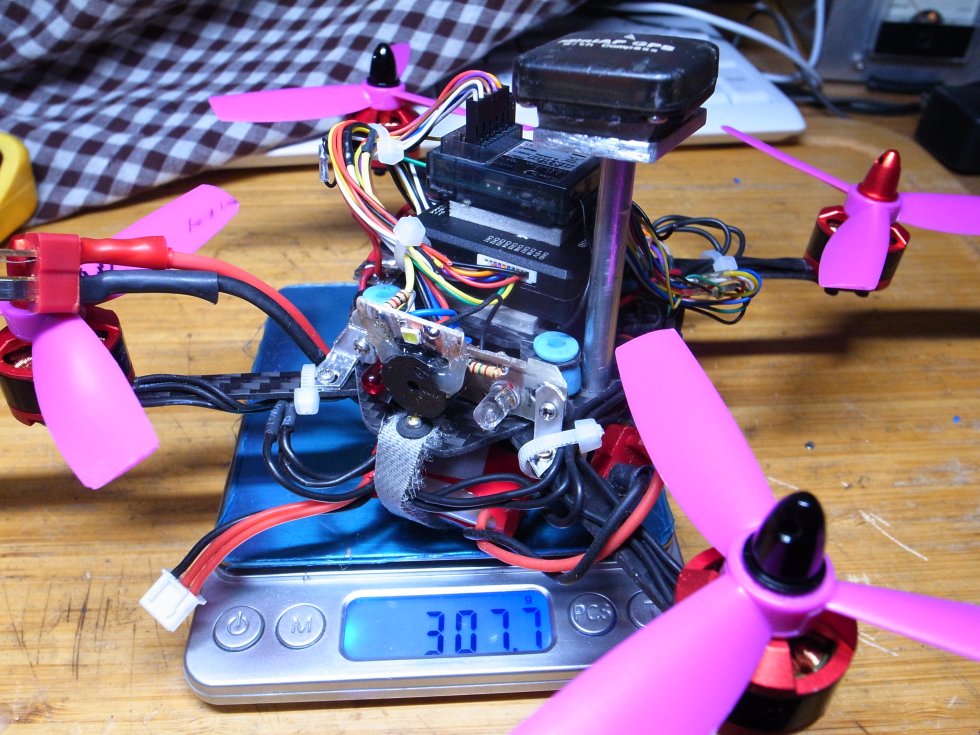
F130QD 軽量を目指して製作しましたが300グラムになってしまった
019/01/30
なかなか、浮上出来なかった。F130QDがとうとう、飛びました。
原因はモーターの力不足かもしれません。
モーター変更 1306/3100KV を 1806/2280KV に変更しました。
バッテリーは1500mAH/7.4V
ところが、このモーター品質が非常に悪い。4個中、音も無く回るのは1個だけ。
何時まで持つのやら。フルスロットルで8Aほどです。
PIDを変更
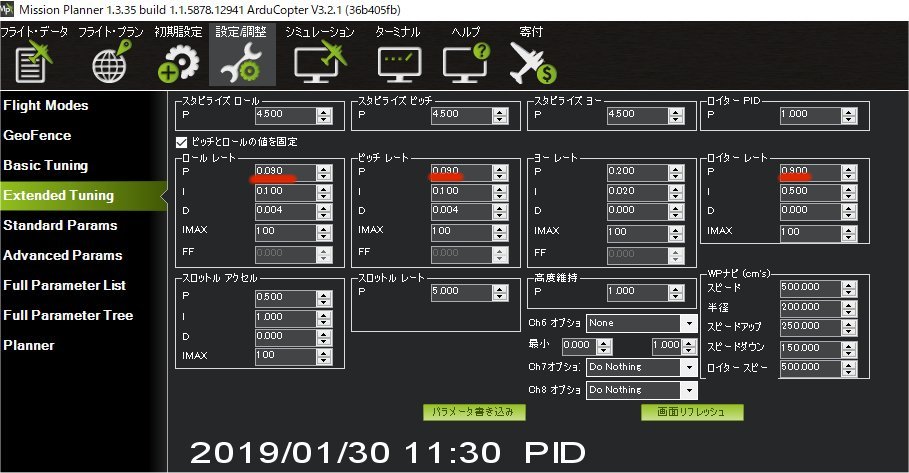
なぜか、これでスイスイ飛ぶようになりました。いままで飛べずに転げていたのは何だったのか??
50gのおもりを付けて室内で飛ばしてみた動画
 (動画)
(動画)
https://youtu.be/pBzwIoiOb9E
機体は写真のように230グラム バッテリーを含むと310gになります。
消費電流は最大7A/7.4V 5分強ほど、手動モードで飛行可能だが、GPS系では不可
でした。原因は不明ですか、PIDの設定? ESCの更正?
飛行時間の計算
1.5AH/Max8A=0.1875H
60分*0.1875=11.25分
設定にもよるが、この80%位とみているので11.25*0.8=9分程度かな
と思いましたが、30秒くらい超えましたね。
外での飛行動画
https://youtu.be/gWXfq7XArqg
当初、正常起動出来ない原因は、APMへの5Vの供給に問題があるようです。現在使っているBECの5V給電の
立ち上がりが、遅いようなのだ。
バッテリーから、レギュレータICに直接接続APMへ給電しておけば、問題なく立ち上がりました。
また、1306/3100KV では300g弱の機体は持ち上げられないようです。
1806/2280KVに変更したら余剰推力50gしか無いが、飛び上がれる。

レギュレータICを取り付けて、バッテリーから直接入力して出力をAPMへ供給することで
正常起動出来るようになった。
完成しDEVO7Eとともに弟にもらってもらった。2019/03/05
 動画:強風下飛行試験
動画:強風下飛行試験
F130QD
PROP 4045/3
MINAPM3.1 MT 1806 2280KV
BAT 1500mAH/2C 300g (230g)
9分30秒 飛行
戻る
2019/02/11 F500QUAD 実験機製作開始
03/11 安定飛行しているし、実験機から普通の機体になりF500QDとした。
オールアルミで作ってみる。カーボンは、加工が大変だし重量的にはアルミと大きく変わらないが、同じ重量なら圧倒的に丈夫だが。。。
やっと届いた3508/580KVかなりでかい。

機体重量は1050g バッテリー搭載で1440gです。超音波のセンサーのみ取り付けてあります。
3S 30AのESCが1個、焼損したので 4S 35A 4in1に交換
モーターのマウントも2mm厚のアルミに交換を完了した。
かなりの強風でしたが、FS=10.5Vの設定で6000mAHの膨らんで劣化した電池で11分弱飛んで着陸
なので10分は確実に飛べそうでした。機体は958gと軽くなりました。

超音波センサーの取り付けを修正して飛行の動画
ブラシレスジンバルにEKEN H9を搭載して飛行動画
動画:その場回頭試験
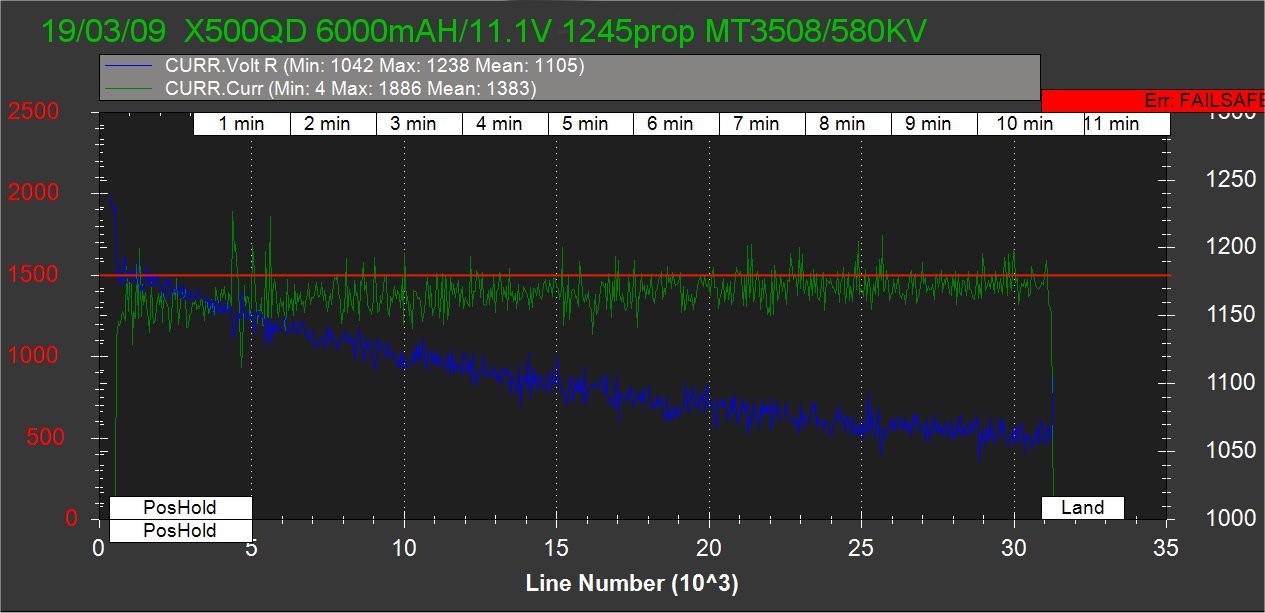
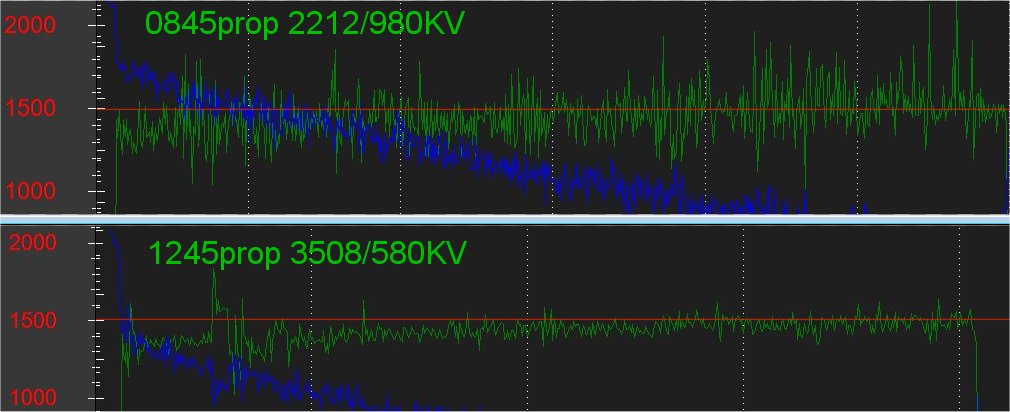
下は同じF500QD(X500QD)機体にプロペラとモーターを交換したときの消費電流の違いです。
明らかにしたの大型モーターと大型プロペラの方が能率が良いのが判りますね。
電流の変動が少ないことも判ります。
残るはESCを4S化してバッテリーも14.8Vにしてみたい。そのまえに5500mAH/11.1Vで何分飛べるかテストします。
バッテリーを5500mAHから3500mAHにしてみた。5500で9分飛んだので6分かと思ったら7分とべました。
古い友人から、預かったF450
、モーターの回転方向が違っていた。ESCが1台APMからの信号で回転しない。
モーターテスターではキチント回転する。GPSが不調、コンパスも不調。FW何度か入れ直し。GPSは完璧に
壊れているようだ。APMは何かが狂っているようで起動音が途中でおわり、USBをつないでおくと正常にはなるが
動かない。モーターテストでは回っている。ESCの校正では回転しない。


右がRM003ユニット、交換で別の受信機が使える
結局、APM2.8、GPS再注文して交換ESCは在庫品に交換。私のはFS-TH9Xなので、この受信機には
合わないので、RM003送信ユニットを買って、接続、ファームウェアーから入れ直し。無事に8分間の初飛行に
成功し送り返したが、自分の送信機でバインド出来ないと言うような話しでしたが、その後音信不通状態。
送信機ごと、戻してもらいテストしたら、送信機によって、RX-APMの配線が異なる事が判りました。
送信機FS-TH9XとRM003の組み合わせと、送信機FS-i6 は配線が異なるようです。
戻る
19.FS-TH9Xのレバーユニット交換
MODE1 の左レバー(前進後進,左右回転)の前後が正常に動作しなくなり、ALIにユニットを手配したが
2つのショップから発送不可で返金手続きした。
BANGGOODに同じのが出ていたので、期待しないで発注したら、スイスイと到着、
早速、交換した。
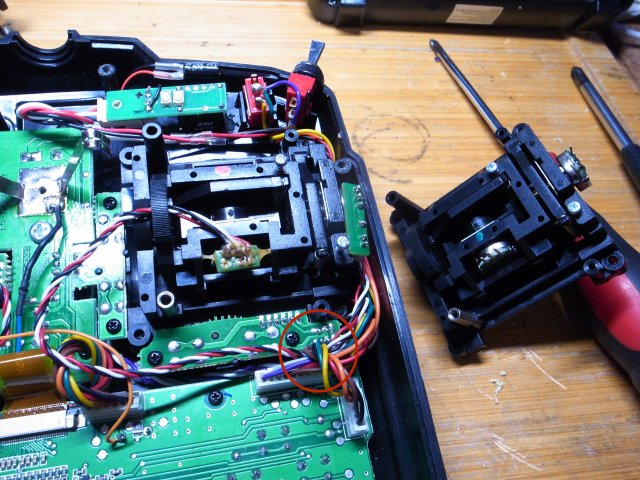
右が新しいユニット。基板側のネジ3本とフロント面のネジ3本を取り外す。
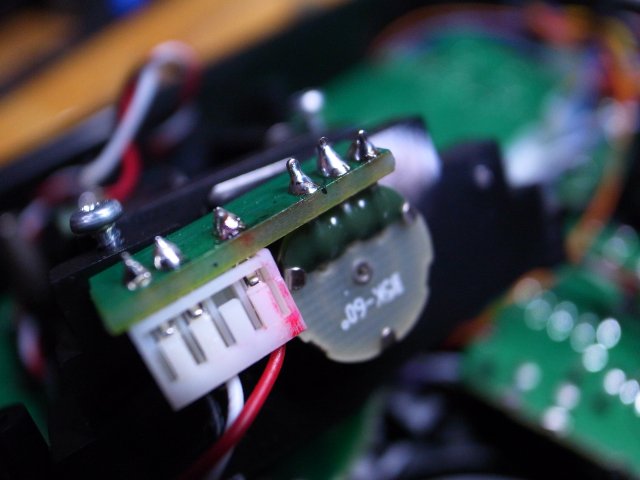
左右のトリム調整の基板も外す。
赤丸でマークした部分の配線がゴタゴタしていて、
取り付けるときに大変なので、覚悟してください。
コネクターも外し、整えてから、無理せずに取り付ける。
ボリュームの基板は半田吸引器で吸い取り、新しいのに、取り付ける。
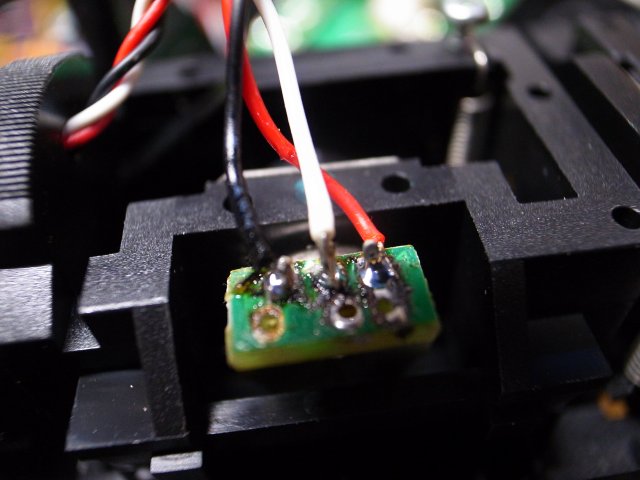
左はゴム系のボンドが付いていた。ボンドを剥がして、半田する。

以上で完了。裏の取り付けねじがゆるゆるなので小さいスポンジを入れて
落ちないようにしている。
6モードスイッチがとうとう、壊れた。以前からモードが変化しなくなったりしていたので、
師匠に連絡したら
予備のパーツを送ってくださって、持っていたので交換しました。原因は私かもしれない。
つまみを無理に押し込んだり、引っ張ったりしたためかもしれない。
下の黒い四角いロータリースイッチの半田を吸引して、新しいのに交換した。
念のため、PWM値を再設定して、無事に飛行テスト完了。2019/03/07
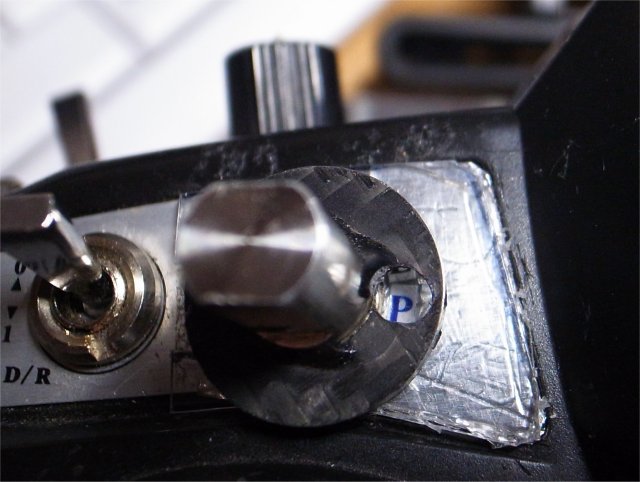
DJC製の6モードスイッチ 組み込み完了で POSHLD の位置
戻る
20.FS-iA6BとFS-i6X

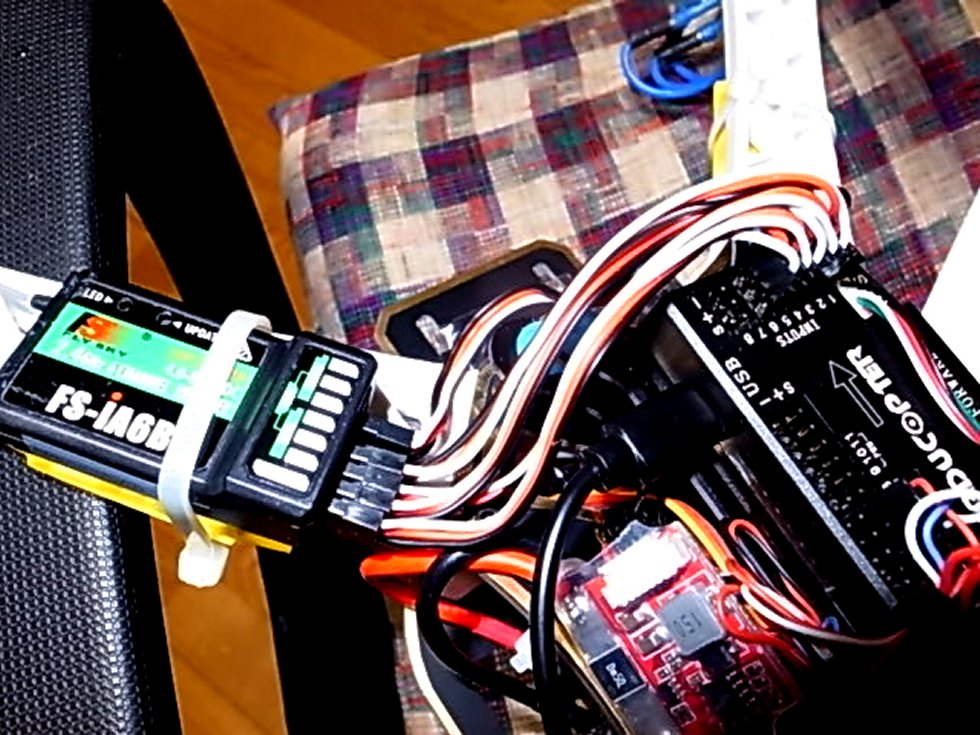
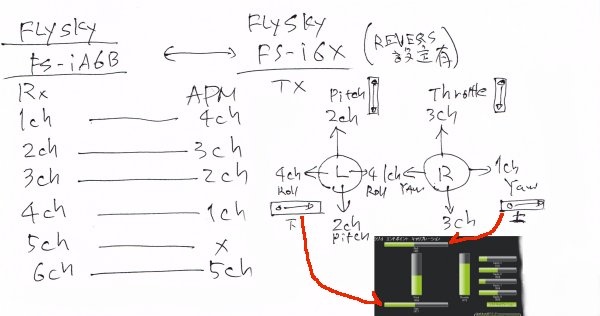
FS-i6X 送信機のリバース設定
1ch 2ch 3ch 4ch 5ch 6ch
R R N R N N
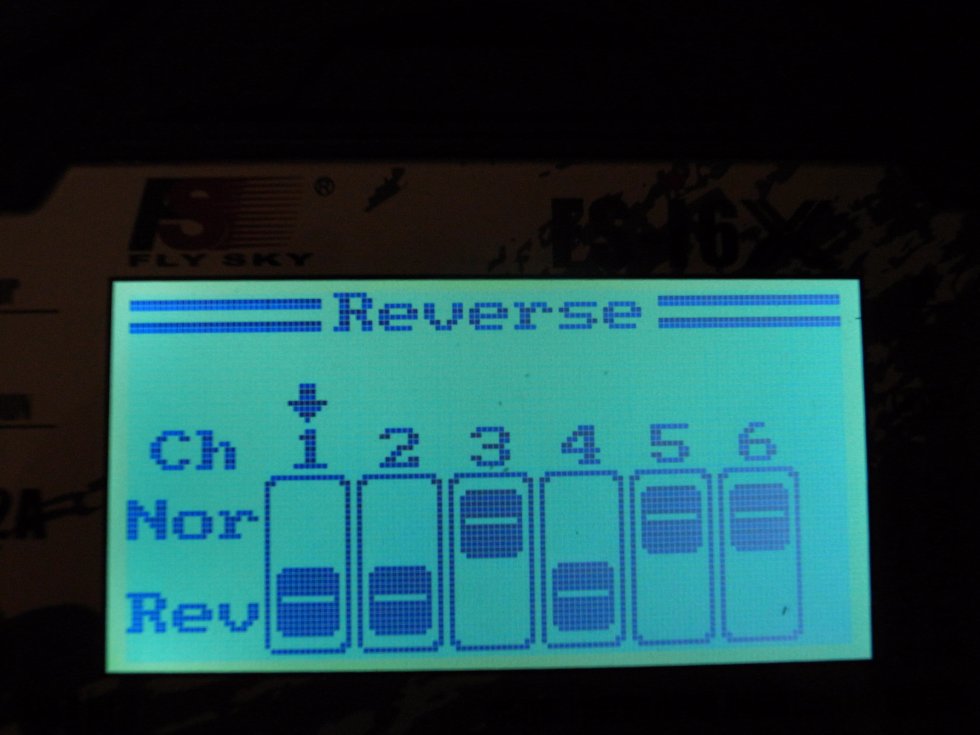
設定がよくわかっていないが、フライトモードを左のボリュームに割り当てられた。

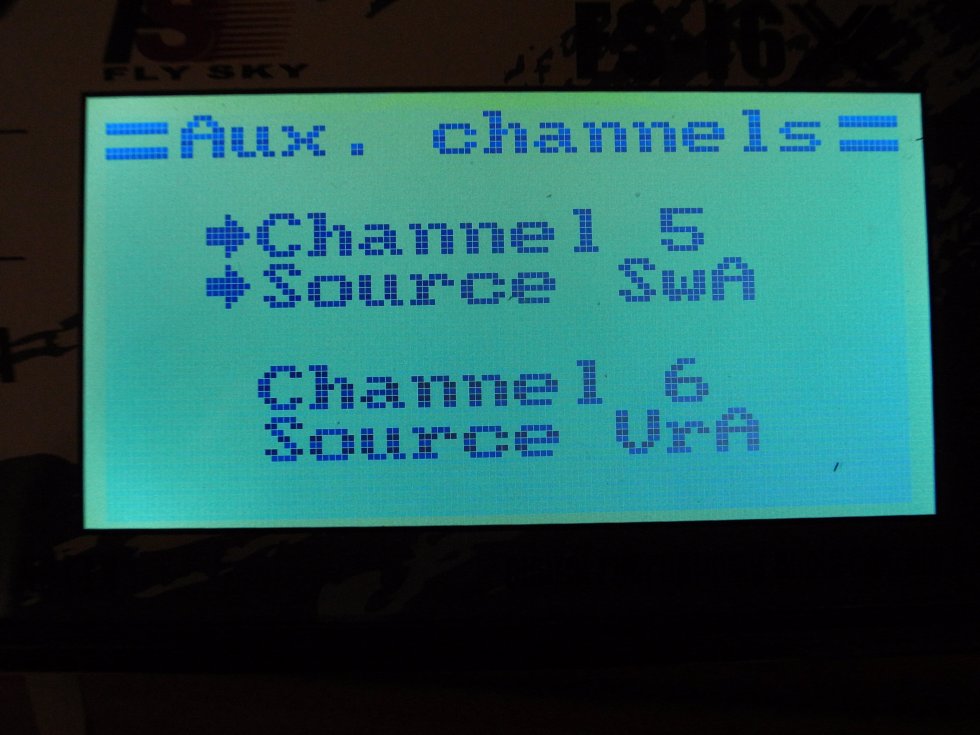
ボリュームに割り当てなので、判りづらいが、無いより良いでしょう。 右は設定した画面
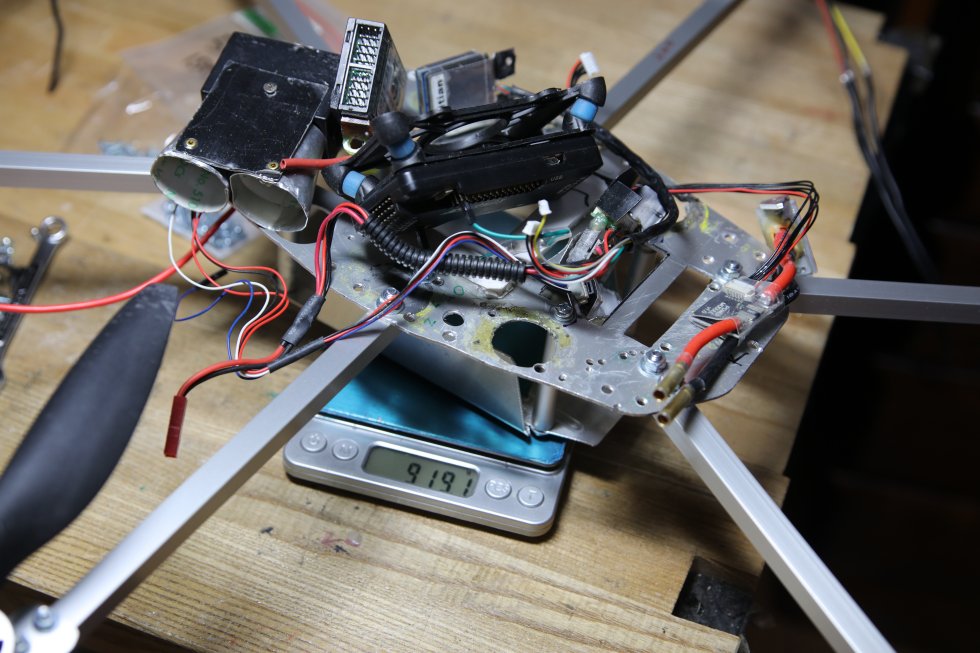
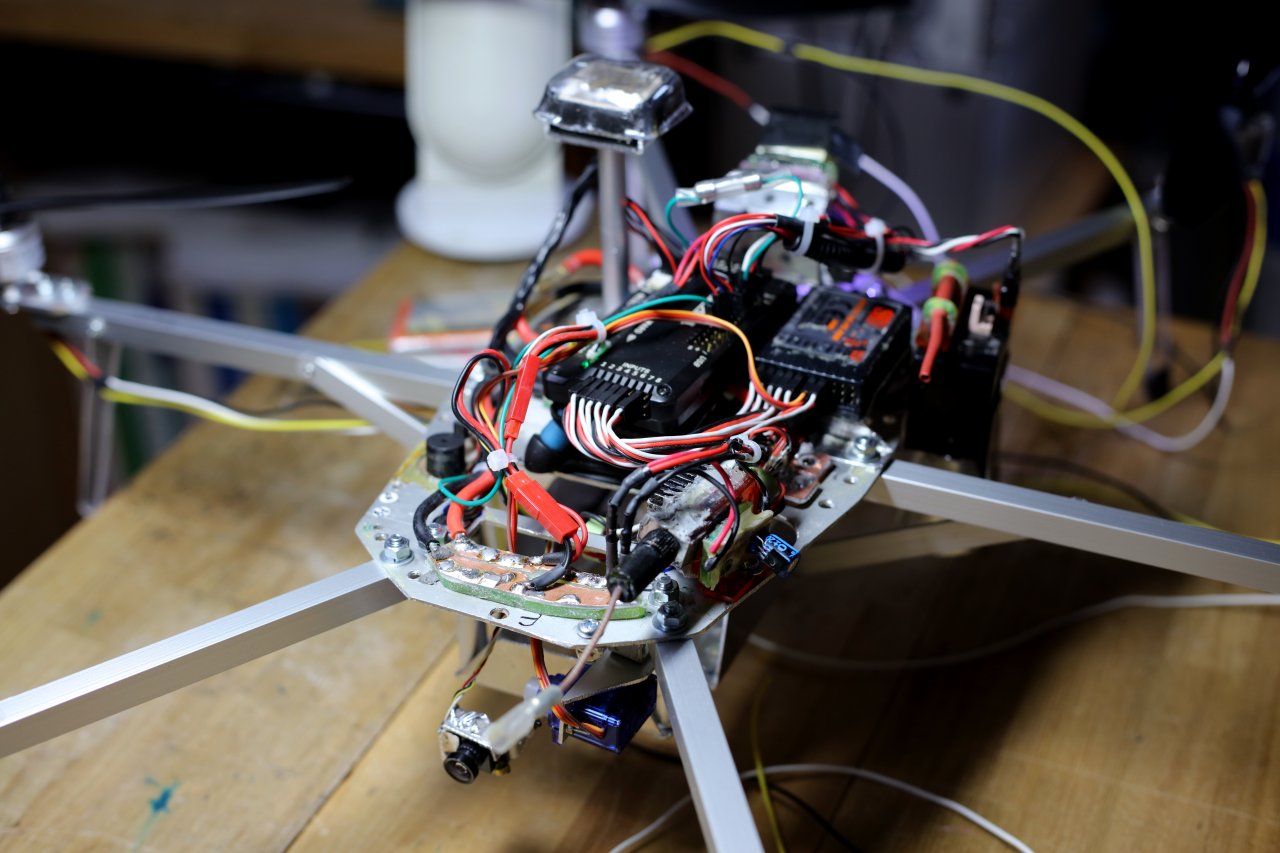
22. F5545HEXを分解リフレッシュ 2019/03/11

APM2.8 MT=4C 2312/920KV WT=2.5kg
重量的に重すぎるので、軽量化を目指して、作り直します。F5545HEXmk2
形式は同様にX型のHEXにします。
MTは現状と同じ4C対応の2312/980KV プロペラは1045/2 もしくは8045/3を予定している
ESCは小型の30Aを使う予定。センターボードを軽量化し、アームもF500QDと同じアルミのコ字の
チャンネルを使う予定。
さっそく、センターボードの上は軽量化、下は新たにコンパクトにして作り
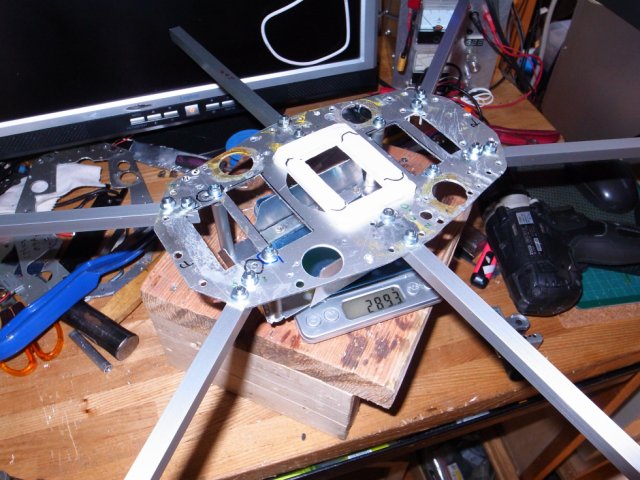

9mmのアルミパイプにM4のオニメナットを
六角レンチでねじ込み、M4ネジでアルミ板と取り付け、バッテリーBOXとセンターボードを接合している。


。
今までのプラスチックアーム1ぽんで54gなのでアームだけで300gを超えているので軽量化は達成してるようだ。
モーターは厚さ3mm幅20mmのアルミに取り付けた。
緩み防止にすべてスプリングワッシャーを取り付けました。
03/13 モーターを取り付け、必要機材を載せて重量は920g残りESCと配線を入れて1kg+くらいになりそうだ。
それでも以前よりは500g近く軽量化になると予想している

超音波センサーとFPVカメラも組み込んだがESC6個と配線が残っている。993g
一番重いバッテリーを入れて1450gなので完成したら1.5kgくらいと思われる。
これならF450QUADと重量的には互角。モーターが小さいのでその分軽い。

F5545MK2 2019/04完成
PROP 1045 MT 2312/920KV/4c
APM2.8
BAT 5000-6000mAH/11.1V-14.8V
カメラマウント+FPV付き1.27kg 1.72kg(bat)
カーボン1045よりもナイロン1045の方が飛行時間、消費電流、レスポンスで優位を示した。
下記のように、今回、無風に近い状態ではあったが9分30秒ほど飛行が出来た(ホバリング中心)
カーボンにすると4-5分と半分程度しか飛べないのだ。しかも、レスポンスが悪く操縦しずらい。

上のように一度だけ20mまで上げて、以降は5m以下の低高度で試験
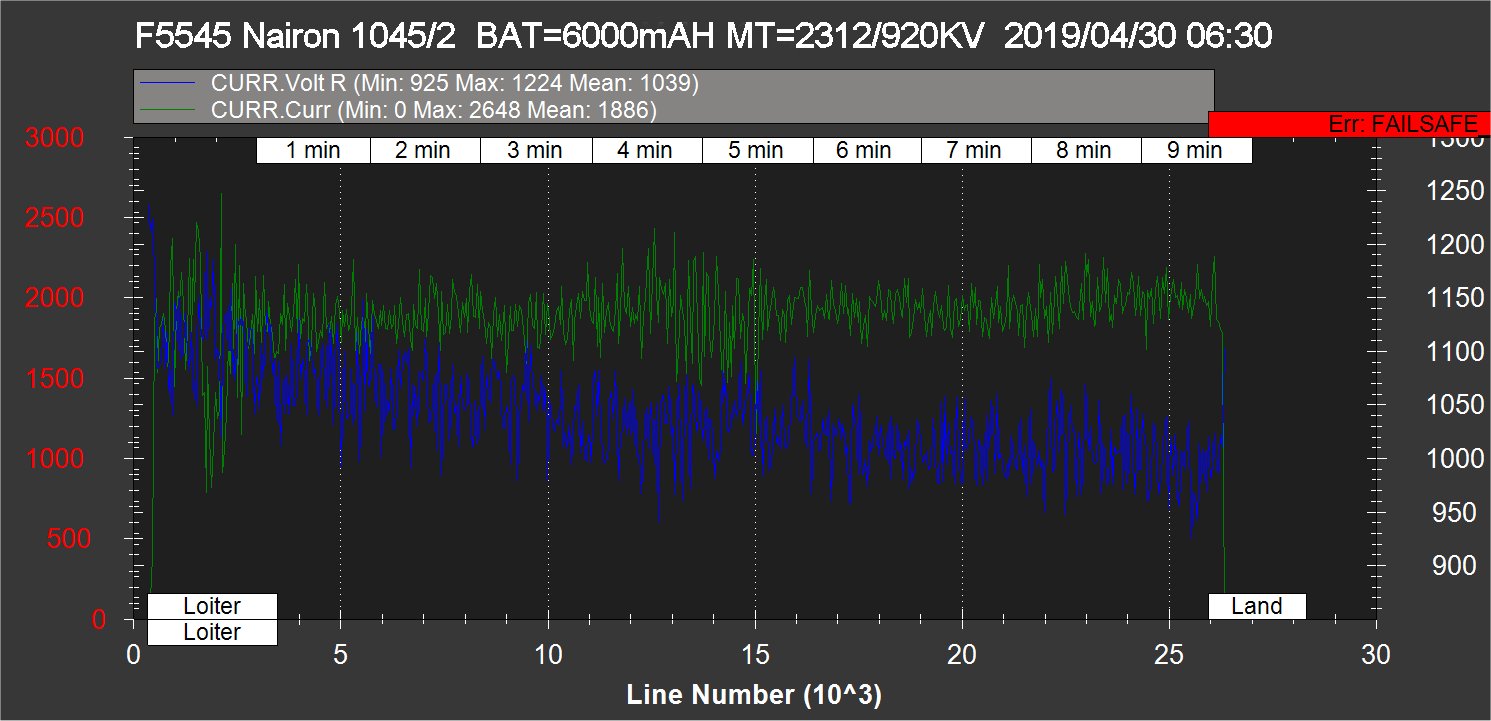
低高度で地面からの風圧の反射もあるためか、20A以下で飛行しているようだ。
2021/03/13
飛行というかホバリング試験。MinAPMは見たことの無いエラーがでましたけど、問題無く飛んでました。
下は クアッドです 3500-5000mAHの数本の電池を入れ換えてテストしたけど、ためですね。寿命ですね。使って無くても劣化しますね。
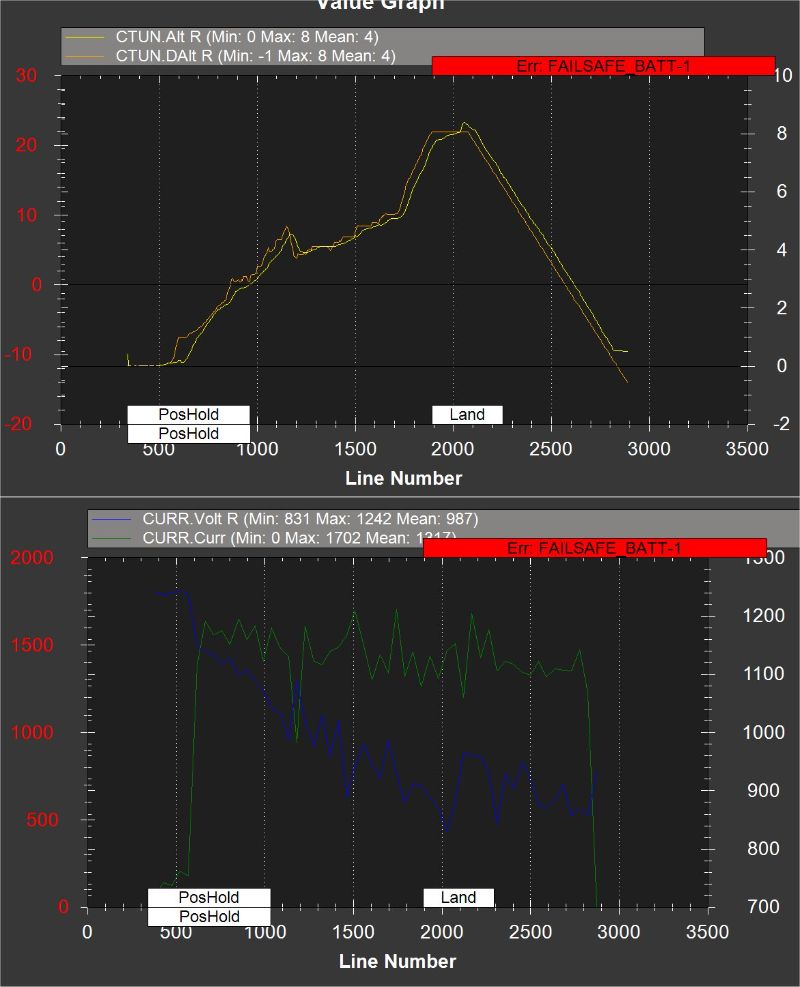
下は HRBの2200mAh/14.8V は5分ほどとびましたが、以前は7分弱だったので、これも劣化してきているようです。
2021/03/13


無事に初飛行も完了、風のかなり強い中7分以上飛行した。FS電圧f10.5V
総電流は18~22Aあたり、クアッド(15A)に比べると多いようだ。モーターも違うので仕方ないかも。
ナイロンのシャフトホールが6mmなのでモーターに合わせて8mmに加工して
飛ばしていたら、プロペラが取り付け部から割れて飛んでいった
8mm穴のカーボンにしてみたがレスポンスが悪いし、飛行時間は4-5分と短かい。
ナイロンの8045/3を取り付けて実験したがカーボンと同程度の消費電流で飛行時間も短い。
再びナイロン1045/2に付け替えて飛行したら9分越えで飛行した。。
3回ほどカーボンでとばしたが、飛行時間は4-6分ととっても短い
今回9555と言うファントム用を手配してみた。
モーターがファントムと同じ規格みたいなので、試してみることにした。

EKENで撮影した写真。





戻る
23.プラグの型式と名称


コネクタ
左端は、ジュポン 右は JSTの2mm と1.25mmです
下の工具を使うと、自作できますが、慣れが必要です。

これは、デュポンのピンです。切り離して、私はコの字になったところを、ペンチで
少し、潰してから工具に差し込みます。セット位置は、一番端の狭いところで、
少し奥まで、入れます。1mm程度奥へ。リードの2mmほど皮をむきます。
ビニールの皮の部分をおしつぶして、留める感じです。

この作業はかなり難しいです。1.25mmはほとんど成功したためしがない。
24.JST配線入れ替え
私は、カッターナイフの先端が使いやすかったのでいつも、これを使っている
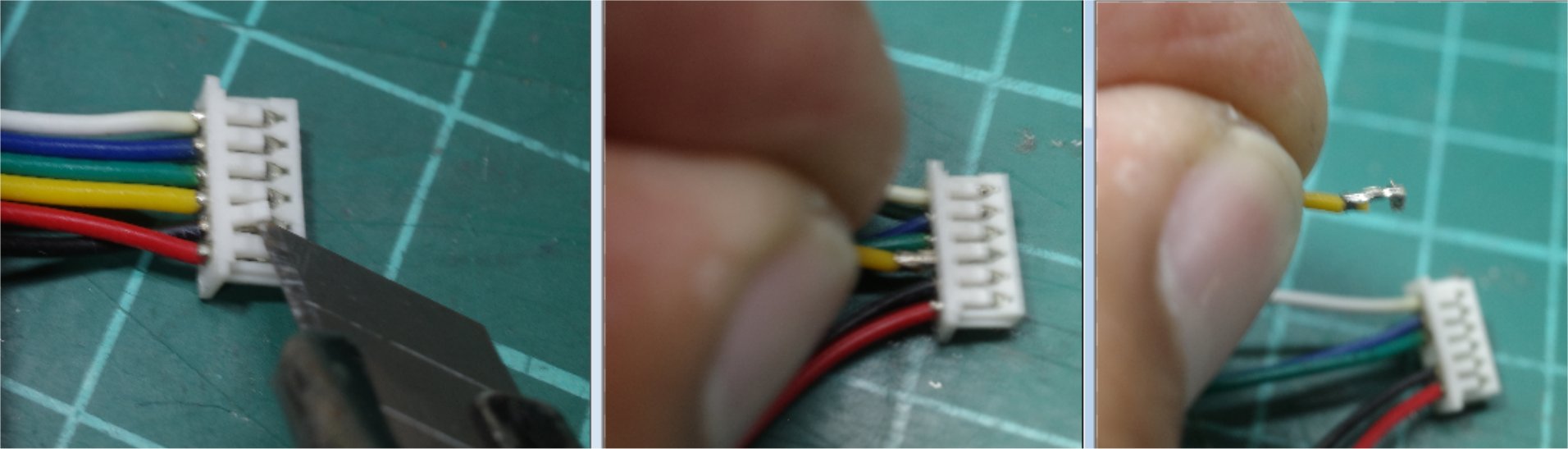
カッターの先端でロックの角を軽く持ち上げます 同時に線を引き出す。この同時が難しい。 この向きで出し入れになりますので注意
------------------------------------------------------------------------------------------------------------------------------------------------
新しい リポバッテリー HRB 5000mAH/11.1V が届きました。F500QDようです。
その説明書によると 4.2-3.7Vで使用しろとのこと。12.6V-11.1Vと言う事になる。
早速 12.57V付近まで充電して、11.2Vまでホバリングさせてみた。
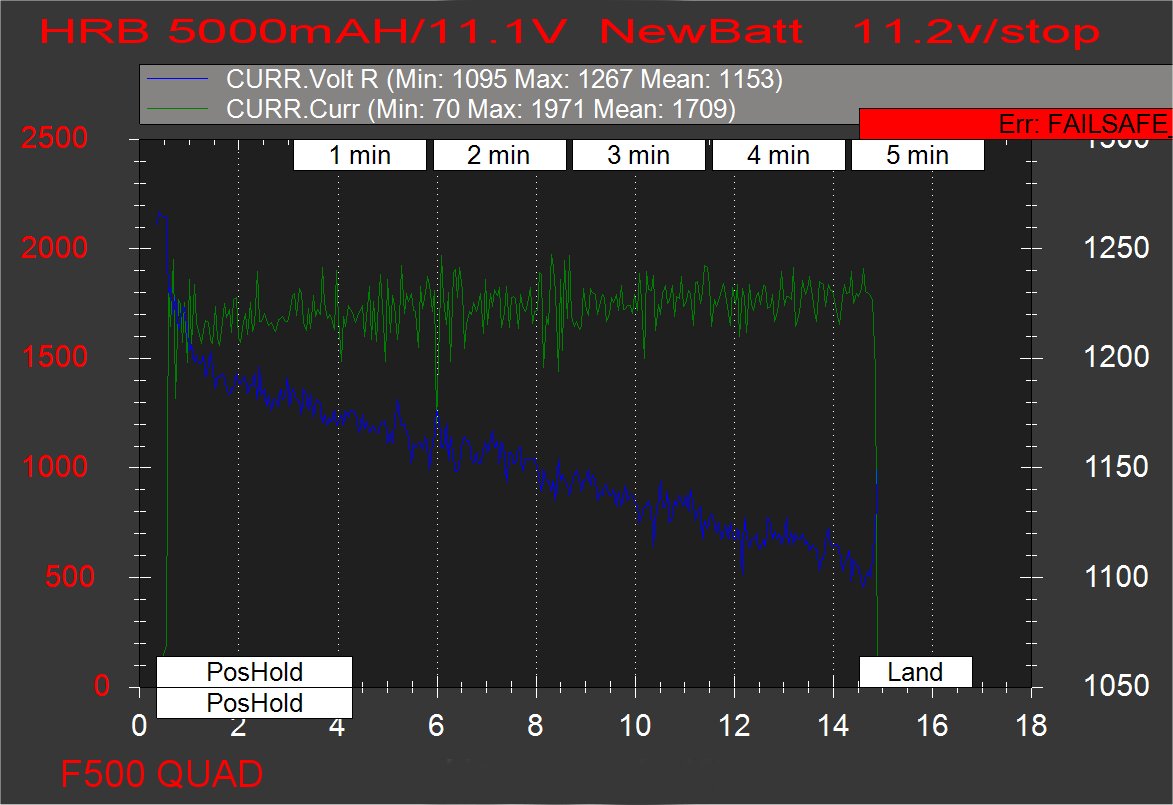
5分を越えた当たりで、電圧低下の警告音が発生して着陸。
この状態で、充電器につなぐと、3.95V(11.85v)
になっていたので、そのまま保管することにした。
やはり、新しい電池は徐々に電圧降下している。風が強い日なので電流値が上下している
おおむね。17.5Aくらい消費している。